Startseite > Produkte > integrierte Schrittmotor Servomotoren > RS485 integrierte Schritt-Servomotoren



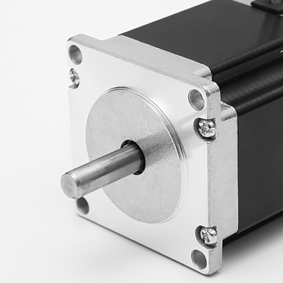
Unser ESS42R ist ein integrierter hybrider geschlossener Schrittmotor auf Basis des RS485-Busses mit Unterstützung des Modbus-RTU-Protokolls. Dieser Motor kombiniert einen hybriden Servomotor und Treiber in einem Gehäuse und verwendet das standardmäßige Modbus-RTU-Bus-Kommunikationsprotokoll zur Steuerung. Die Flanschgröße beträgt 42 mm. Im Vergleich zur herkömmlichen Kombination aus Schrittmotor, Treiber und Schrittmotor ist er kostengünstiger. Dieser integrierte hybride Servomotor vereint die Vorteile der Buskommunikationssteuerung, einfacher Verdrahtung, keiner verlorenen Schritte, geringer Temperaturerhöhung, geringem Geräuschpegel, hoher Drehzahl, hohem Drehmoment und niedriger Kosten und stellt somit ein äußerst kosteneffizientes Produkt für die Bewegungssteuerung dar.
Eigenschaften
Elektrische Spezifikationen
Eingangsspannung |
DC 24V |
Ausgangsstrom |
Spitzenwert 2,5A (Veränderungen mit Last) |
Logische Eingabe |
7 bis 16mA, empfehlen 10mA |
Art der Kommunikation |
Die Nummer des Zertifikats ist: |
Maximale Kommunikationsrate |
38400bps |
Physikalische Spezifikationen
Phase |
2 |
Schrittwinkel |
1,8 Grad |
Rahmengröße |
42*42 mm |
Spannung |
2,1 VDC |
Aktuell |
1.5 A |
Widerstand |
1,4±10 % Ω |
Induktivität |
2,5±20 % mH |
Haltedrehmoment |
0,45 N·m |
Motorlänge |
48 mm |
Einsatzumgebung und Parameter
Kühlungsart |
Natürliche Kühlung oder Außengelder |
|
Verwendungsumgebung |
Nutzen Sie Gelegenheiten |
Versuchen Sie, Staub, Öl und ätzende Gase zu vermeiden |
Temperatur |
0~40℃ |
|
Feuchtigkeit |
40 bis 90% RH |
|
Vibration |
5,9 m/s2 Max |
|
lagertemperatur |
-20℃~80℃ |
|
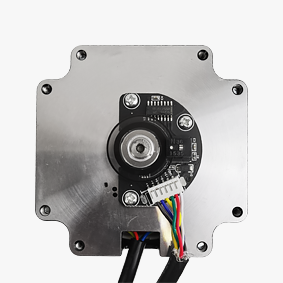
Schnittstellendefinition
1. Stromversorgung und Kommunikationsanschluss
Nummer der Spitze |
Symbol |
Name |
Beschreibung |
1 |
+Vdc |
Gleichstrom-Positivterminal |
Eintritt von DC+24V |
2 |
GND |
Gleichstrom-Erdnetz |
|
3 |
NC |
|
|
4 |
485-GND |
RS485-Kommunikationsschnittstelle |
|
5 |
485-A |
|
|
6 |
485-B |
|
2. Steuersignalanschluss
Nummer der Spitze |
Symbol |
Name |
Beschreibung |
1 |
Zcw |
Positiver Grenzwert |
Unterstützt nur 24-V-Spannung (bei Bedarf kann eine Unterstützung für 5-V-Spannung kundenspezifisch angepasst werden) |
2 |
Startseite |
Mechanischer Ursprung |
Unterstützt nur 24-V-Spannung |
3 |
CW |
Negativer Grenzwert |
Unterstützt nur 24-V-Spannung |
4 |
X-COM |
Eingangs-Gemeinschaftsanschluss |
Kompatibel mit gemeinsamer Anode und gemeinsamer Kathode |
5 |
NC |
|
|
6 |
PEND |
Positionssignal-Ausgang |
|
7 |
ALM |
Alarmsignal |
|
8 |
Y-COM |
Ausgangs-Gemeinschaftsanschluss |
Nur an den Minuspol der Stromversorgung anschließen |
3. Statusanzeige
PWR: Leistungsanzeigerlicht. Wenn der Strom eingeschaltet ist, ist das grüne Anzeiglicht an.
ALM: Fehleranzeigeleuchte.
Einmaliges Blinken des roten Lichts innerhalb von 3 Sekunden: Überstrom- oder Kurzschlussfehler zwischen Phasen;
Zweimaliges kontinuierliches Blinken des roten Lichts innerhalb von 3 Sekunden: Überspannungsfehler;
Siebenmaliges kontinuierliches Blinken des roten Lichts innerhalb von 3 Sekunden: Positionsfehleralarm.
DIP-Schalter-Einstellung
ESS42R verwendet einen 5-Bit-DIP-Schalter zur Einstellung der Antriebsstation und der Kommunikations-Baudrate.
SW1~SW3: Einstellung der Antriebsstation. SW4: Kommunikations-Baudrate des Antriebs. Nachdem die Slave-Nummer und die Kommunikations-Baudrate geändert wurden, muss das Gerät neu eingeschaltet werden, damit die Einstellungen wirksam werden.
Zahl der Sklaven |
SW1 |
SW2 |
SW3 |
Standard |
Bei |
Bei |
Bei |
1 |
Aus |
Bei |
Bei |
2 |
Bei |
Aus |
Bei |
3 |
Aus |
Aus |
Bei |
4 |
Bei |
Bei |
Aus |
5 |
Aus |
Bei |
Aus |
6 |
Bei |
Aus |
Aus |
7 |
Aus |
Aus |
Aus |
Hinweis: Die Einstellung der Slave-Stationsnummer kann, wenn sie sich in der Standarddatei befindet, durch Einstellen des benutzerdefinierten Laufwerks-Slave-Stationsnummernregisters (0x0020) definiert werden, der Bereich liegt zwischen 1 und 31.
Kommunikations-Baudrate |
SW4 |
9600 |
Bei |
38400 |
Aus |
Hinweis: Wenn die Kommunikationsbaudrate auf 9600 bps eingestellt ist, ist das serielle Datenformat auf 8 Datenbits, keine Parität und 1 Stoppbit festgelegt. Bei der Einstellung auf drei andere Baudraten wird das serielle Datenformat durch das serielle Datenformatregister (0x0021) bestimmt.
SW5: RS485-Terminatorwiderstand. Der Busendtreiber muss diesen DIP-Schalter auf ON stellen, alle anderen Treiber müssen ihn auf OFF stellen.
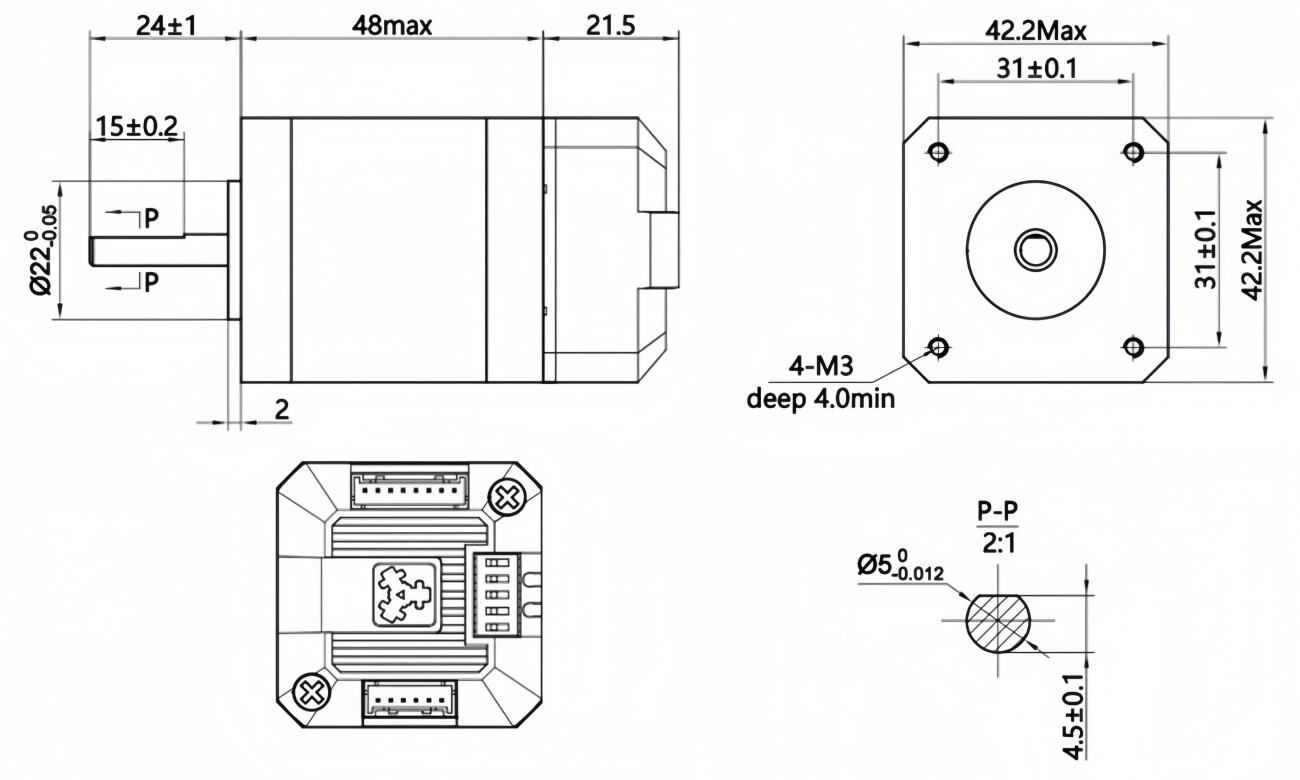
Gesamtabmessungen
Anwendung
Unser integrierter Schrittmotor-Servomotor ESS42R eignet sich für verschiedene kleine und mittlere Automatisierungsgeräte und -instrumente, wie beispielsweise Industrieroboter, Textilmaschinen, spezielle industrielle Nähmaschinen, Abisoliermaschinen, Markiergeräte, Schneidemaschinen, Laserbelichter, Plotter, CNC-Werkzeugmaschinen, Graviermaschinen, automatische Montageanlagen usw.
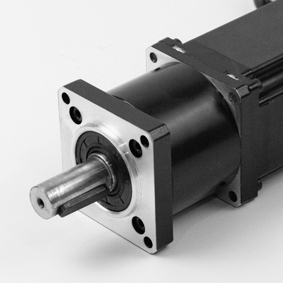
Individueller Service
Wir bieten eine Vielzahl von Anpassungsoptionen in der Gestaltung an, wie z. B. Ausgangswelle-Typ, Steckverbinder, Bremsen, Encoder und Getriebe usw. Nutzer können je nach tatsächlichem Bedarf flexibel auswählen. Auch besondere Anpassungsanforderungen können entworfen und hergestellt werden.
Optionen
Drähte |
Flansch |
Welle |
Schraube |
|
|
|
|
Encoder |
Bremse |
Getriebe |
Und mehr |
|
|
|
+ |
Zertifikat
Wir haben das ISO-9001 Qualitätszertifizierungssystem bestanden und numerous Anwendungspatente erhalten. Unsere Produkte verfügen über internationale Zertifikate wie CE und ROHS.

Bewertung
Urheberrecht © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Alle Rechte vorbehalten. - Datenschutzrichtlinie