Startseite > Produkte > integrierte Schrittmotor Servomotoren > Impulseintegrierte Schritt-Servomotoren


Der JSS86P ist ein innovatives, integriertes hybrides Servoantriebssystem mit Kommunikationsfunktionen. Dabei sind Schrittmotor-Servotreiber und Motor in einem Gehäuse vereint. Dank der Closed-Loop-Technologie vermeidet das System Schrittverluste und gewährleistet hohe Präzision. Der Drehmomentabfall bei hohen Drehzahlen ist deutlich geringer als bei herkömmlichen Open-Loop-Antrieben, wodurch die Hochgeschwindigkeitsleistung und das Drehmoment des Schrittmotors erheblich verbessert werden. Die lastabhängige Stromregelungstechnik senkt die Motortemperaturerhöhung wirksam und verlängert so die Lebensdauer. Integrierte Positionserreichungs- und Alarmausgänge ermöglichen eine bequeme Überwachung und Steuerung durch den Hostrechner. Der Positionsüberlaufalarm stellt den sicheren Betrieb von Bearbeitungsmaschinen sicher.
Eigenschaften
Es verwendet einen fortschrittlichen 32-Bit-ARM-Chip und Closed-Loop-Regelungstechnologie;
Es arbeitet im Closed-Loop-Modus ohne Schrittzahlverlust und unterstützt zudem den Open-Loop-Modus.
Erhöhung des Ausgangsdrehmoments und der Laufgeschwindigkeit des Motors;
Der Strom wird intelligent entsprechend der Last angepasst, um die Erwärmung des Motors zu reduzieren; es ist ein Sperrstrom für den Elektromagneten sowie ein einstellbarer maximaler Closed-Loop-Strom vorhanden;
Es passt sich allen Arten mechanischer Lastbedingungen an (einschließlich Pulley-Lasten mit geringer Steifigkeit) und erfordert keine Anpassung der Reglerverstärkungsparameter;
Die Zeitkonstante des Positions-Befehls-Glättungsfilters ist einstellbar, wodurch der Motor ruhiger läuft, die Vibrationen geringer sind und die dynamische Leistung bei Beschleunigung und Verzögerung verbessert wird;
Nach der Positionierung: statische Haltekraft bei Nullgeschwindigkeit ohne Vibration;
Unterstützt Einzel- und Doppelpuls-Eingang mit einer maximalen Pulsantwortfrequenz von 200 kHz;
Unterstützt 15 feste gebrochene Teilungen und ermöglicht softwaredefinierte Unterteilungen (200 bis 65535);
Unterstützt das Modbus-RTU-Protokoll über RS232 und ermöglicht so Positions- und Geschwindigkeitssteuerung per Kommunikation;
Unterstützt die Überwachung des Motorbetriebszustands, einschließlich Drehzahl, Positionsabweichung, Zwischenkreisspannung und Betriebsstrom;
Spannungsbereich: DC +24 V bis 80 V;
Verfügt über Überstrom-, Überspannungs- und Positionsabweichungsschutz;
Elektrische Spezifikationen
Modell-Nr. |
Schrittwinkel |
Motorlänge |
Aktuell /Phase |
Widerstand /Phase |
Induktivität /Phase |
Haltedrehmoment |
|
(°) |
(L1) mm |
(L2) mm |
Ein |
ω±10% |
mH±20% |
N.M |
|
|
JSS86P-4.5N-BC38
|
1.8 |
82 |
128 |
4.5 |
0.7 |
5.5 |
4.5 |
|
JSS86P-6.5N-BC38
|
1.8 |
100 |
145 |
5.0 |
0.5 |
4 |
6.5 |
|
JSS86P-8.5N-BC38
|
1.8 |
118 |
163 |
6.0 |
0.5 |
4.5 |
8.5 |
|
JSS86P-10N-BC38
|
1.8 |
128 |
173 |
6.0 |
0.6 |
5 |
10 |
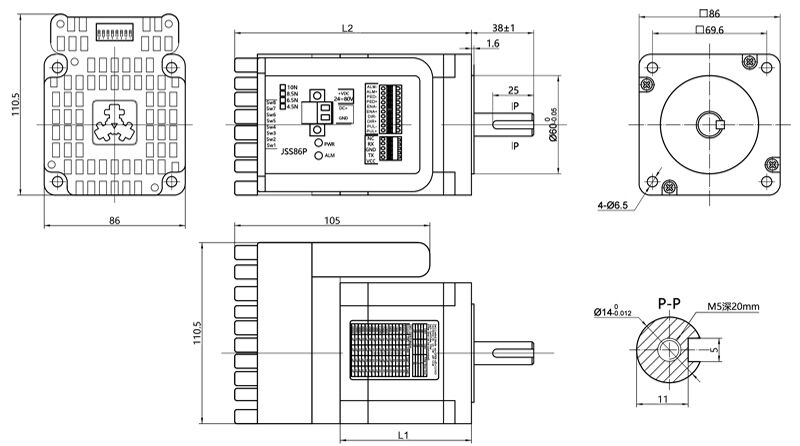
Gesamtabmessungen
Elektrische Anzeiger
Netzteil |
DC+24~80 V, empfohlene Stromversorgung: DC+60 V |
Ausgangsstrom |
Spitzenstrom 7,0 A (Strom variiert je nach Last) |
Logische Eingabe |
7~16mA, empfohlen 10mA |
Pulsfrequenz |
0~200KHz |
Nummer der Encoderzeile |
1000 |
Isolationswiderstand |
≥ 500 MΩ |
Einsatzumgebung und Parameter
Kühlmethode |
Natürliche Kühlung oder Außengelder |
|
Nutzung Umgebung |
Nutzen Sie die Gelegenheit |
Versuchen Sie, Staub, Öl und ätzende Gase zu vermeiden |
Temperatur |
0~40℃ |
|
Feuchtigkeit |
40 bis 90% RH |
|
Vibration |
5,9 m/s2 Max |
|
Lagertemperatur |
-20℃~80℃ |
|
Schnittstellendefinition
Stromeingangsanschluss
Nummer des Terminals |
Symbol |
Name |
Erklären |
1 |
+Vdc |
Positivpol der Gleichstromspannungsquelle |
Gleichspannung + 24 V bis 48 V Empfohlene Stromversorgung: DC+60 V |
2 |
GND |
Gleichstrom-Erdnetz |
Steuer-Signaleingang
Nummer des Terminals |
Symbol |
Name |
Beschreibung |
1 |
PUL+ |
Impulse-positiver Eingang |
Unterstützung 5 ~ 24 V |
2 |
PUL- |
Impulse-Negativ-Eingang |
|
3 |
DIR+ |
Positiver Einstieg in Richtung |
|
4 |
- Ich weiß. |
Richtung negativ eingegeben |
|
5 |
EN+ |
Aktivieren von positiver Eingabe |
|
6 |
EN- |
Aktivieren von negativen Eingaben |
|
7 |
PEND+ |
Das Ankunftssignal wird ausgegeben |
Der OC-Gatter-Ausgang zeigt an, dass die geschlossene Position die Standardeinstellung ist, während die Offen-Position ist noch nicht erkannt. |
8 |
- Das ist nicht wahr. |
Ankunftssignal – negativer Ausgang |
|
9 |
ALM+ |
Alarm-Signal ist aktiv |
Die OC-Tür-Ausgabe hat ein Alarmsignal für den standardmäßig geschlossenen Indikator und kein Alarmsignal für den offenen Indikator. |
10 |
- Ich weiß nicht. |
Negativer Alarm-Signal-Ausgang |
RS232-Kommunikationsanschluss
Nummer des Terminals |
Symbol |
Name |
1 |
+5V |
Positiver Anschluss der Stromversorgung |
2 |
TXD |
RS232-Sender |
3 |
GND |
Masse der Stromversorgung |
4 |
RXD |
RS232-Empfänger |
5 |
NC |
|
Statusanzeige
PWR: Netzspannungsanzeige. Die grüne Leuchte leuchtet bei eingeschalteter Stromversorgung.
ALM: Fehleranzeige. Ein einzelner roter Lichtblitz innerhalb von 3 Sekunden deutet einen Überstrom- oder Phasenkurzschluss an; zwei aufeinanderfolgende Blitze innerhalb von 3 Sekunden deuten einen Überspannungsfehler an; fünf aufeinanderfolgende Blitze innerhalb von 3 Sekunden lösen einen Positionsfehleralarm aus.
DIP-Schalter-Einstellung
Der JSS86 verwendet einen 8-Bit-DIP-Schalter zur Einstellung der Filterzeit, der Drehrichtung des Motors und der Unterteilungsgenauigkeit.
SW1 steuert die Modusauswahl: Ein für Regelung im offenen Regelkreis, Aus für Regelung im geschlossenen Regelkreis.
SW2 steuert die Drehrichtung des Motors: Ein (CW) für Rechtsdrehung, Aus (CCW) für Linksdrehung.
SW3–SW4 steuern die Filterzeit für Positions-Befehle. Eine längere Filterzeit gewährleistet einen ruhigeren Motorlauf und geringeres Geräusch. Die Filterzeit kann flexibel über die Software des Host-Computers angepasst werden.
SW3 |
SW4 |
Filterzeit (ms) |
Bei |
Bei |
0 (In dieser Stufe können Sie die Filterzeit über die Kommunikation ändern) |
Aus |
Bei |
3 |
Bei |
Aus |
15 |
Aus |
Aus |
30 |
SW5, SW6, SW7, SW8: Unterteilungseinstellungen.
Schritte / Kreis |
SW5 |
SW6 |
SW7 |
SW8 |
Standard |
Bei |
Bei |
Bei |
Bei |
800 |
Aus |
Bei |
Bei |
Bei |
1600 |
Bei |
Aus |
Bei |
Bei |
3200 |
Aus |
Aus |
Bei |
Bei |
6400 |
Bei |
Bei |
Aus |
Bei |
12800 |
Aus |
Bei |
Aus |
Bei |
25600 |
Bei |
Aus |
Aus |
Bei |
51200 |
Aus |
Aus |
Aus |
Bei |
1000 |
Bei |
Bei |
Bei |
Aus |
2000 |
Aus |
Bei |
Bei |
Aus |
4000 |
Bei |
Aus |
Bei |
Aus |
5000 |
Aus |
Aus |
Bei |
Aus |
8000 |
Bei |
Bei |
Aus |
Aus |
10000 |
Aus |
Bei |
Aus |
Aus |
20000 |
Bei |
Aus |
Aus |
Aus |
40000 |
Aus |
Aus |
Aus |
Aus |
Anwendung
Unser integrierter Schrittmotor-Servomotor JSS86P eignet sich für verschiedene kleine und mittelgroße automatisierte Geräte und Instrumente, wie z. B. Industrieroboter, Textilmaschinen, spezielle industrielle Nähmaschinen, Kabelentmantelungsmaschinen, Markiermaschinen, Schneidemaschinen, Laser-Setzsysteme, Plotter, CNC-Werkzeugmaschinen, Gravurmaschinen und automatische Montageanlagen. Besonders effektiv in Anwendungen mit geringem Geräuschpegel und hoher Geschwindigkeit.
Individueller Service
Wir bieten eine Vielzahl von Anpassungsoptionen in der Gestaltung an, wie z. B. Ausgangswelle-Typ, Steckverbinder, Bremsen, Encoder und Getriebe usw. Nutzer können je nach tatsächlichem Bedarf flexibel auswählen. Auch besondere Anpassungsanforderungen können entworfen und hergestellt werden.
Zertifikat
Wir haben das ISO-9001 Qualitätszertifizierungssystem bestanden und numerous Anwendungspatente erhalten. Unsere Produkte verfügen über internationale Zertifikate wie CE und ROHS.
|
|
|
|
|
|
|
Bewertung

Urheberrecht © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Alle Rechte vorbehalten. - Datenschutzrichtlinie