

Page D’Accueil > Produits > Moteurs Et Périphériques Pas à Pas À Boucle Fermée > Le conducteur de la passoire en boucle fermée

Notre 3HSS2260 est un servomoteur pas à pas hybride haute puissance. Il s'adapte aux moteurs pas à pas triphasés NEMA 34 et NEMA 42. Par rapport au pilote pas à pas traditionnel en boucle ouverte, ce servomoteur pas à pas peut éviter complètement le problème de perte de pas du moteur pas à pas, la diminution du couple à grande vitesse est extrêmement inférieure à celle du pilote pas à pas en boucle ouverte, améliorant considérablement les performances et le couple du moteur à grande vitesse. Le courant du pilote peut être contrôlé automatiquement en fonction de la charge, il limite efficacement l'augmentation de la température du moteur, prolonge la durée de vie du moteur. La position intégrée et la sortie du signal d'alarme sont pratiques pour l'ordinateur hôte pour surveiller et contrôler l'état de fonctionnement du moteur. La fonction d'alarme d'erreur de surposition garantit le fonctionnement sûr de l'équipement. C'est le remplacement et la mise à niveau idéaux du pilote en boucle ouverte traditionnel, et il est également doté de fonctions partielles du système servo AC, le prix n'est que la moitié du système AC.
1. Caractéristiques
● Technologie de contrôle en boucle fermée DSP 32 bits et vectorielle
● Sans perte de pas, haute précision de positionnement
● Améliorer le couple de sortie du moteur et la vitesse de travail
● Technologie de contrôle de courant variable, limite l'augmentation de la température du moteur
● S'adapter à une variété de conditions de charge mécanique (y compris les poulies à faible rigidité), non
il faut ajuster le paramètre de gain
● Déplacement fluide et fiable, faible vibration, grande amélioration de l'accélération et de la décélération
● La capacité de vitesse nulle statique sans vibration
● S'adapter au moteur servo hybride NEMA34 et NEMA 42 à 3 phases
● Fréquence maximale d'impulsion de pas 200 KHZ
● Micro pas 400-60000 impulsions/tour
● Plage de tension AC150-240V
● Protection contre les surintensités, les surtensions et les surpositions
● Affichage à six tubes numériques, paramètres faciles à régler et surveillance de l'état de fonctionnement du moteur
2.Paramètre électrique
Tension d'entrée |
AC150~240V (Utilisation typique de 220VAC) |
Courant de sortie |
Pic 6,0 A (courant variable en fonction de la charge) |
Entrée de courant logique |
7 à 20 mA |
Fréquence |
0 à 200 kHz |
Moteur adapté |
moteur servo hybride NEMA 34 et NEMA 42 à 3 phases |
Résolution du codeur |
1000 |
Résistance à l'isolation |
≥ 500 MΩ |
3.Paramètre d'environnement
Méthode de refroidissement |
Refroidissement par air forcé ou refroidissement par air naturel |
Environnement de travail |
Évitez la poussière, le brouillard d'huile et les gaz corrosifs |
Température de fonctionnement |
0~50℃ |
Humidité |
40 à 90% de RH |
Vibration |
5,9 m/s2 Max |
Température de stockage |
-20℃~65℃ |
3. Ports d'interface d'alimentation1
Port |
Le symbole |
Définition |
Remarque |
1 |
L |
Connecteur d'alimentation du moteur à 220 AC |
|
2 |
N |
|
|
3 |
NC |
Non connecté |
|
4 |
BR |
Résistance de freinage |
Résistance de freinage externe connectée entre Br et P+ |
5 |
P+ |
Tension du bus DC |
4. Ports d'interface d'alimentation2
Port |
Le symbole |
Définition |
NEMA34 |
NEMA42 |
1 |
Je vous en prie. |
Port de connexion du moteur U |
ROUGE |
NOIR |
2 |
V. Le groupe |
Port de connexion du moteur V |
NOIR |
BRUN |
3 |
Le |
Port de connexion du moteur W |
Bleu |
Bleu |
4 |
PE |
Le sol |
jaune |
jaune |
5 |
L |
Alimentation du contrôleur Connectez-vous à 220 VCA |
Gamme AC150-220V |
|
6 |
N |
|||
5. Ports d'interface de signal de contrôle
Port |
Le symbole |
Définition |
Remarque |
3 |
PUL+ |
Entrée de signal d'impulsion + |
|
4 |
PUL- |
Entrée de signal d'impulsion - |
|
5 |
DIR+ |
Entrée du signal de direction + |
|
6 |
Je vous en prie. |
Entrée du signal de direction - |
|
7 |
L'ALM+ |
Sortie de signal d'alarme + |
|
8 |
Je suis là. |
Sortie de signal d'alarme - |
|
9 |
PEND+ |
Sortie du signal de position + |
|
10 |
Je suis en attente. |
Sortie du signal de position - |
|
11 |
Le projet de loi |
Activer l'entrée du signal + |
|
12 |
Je suis là. |
Activer l'entrée du signal - |
|
23 |
OA+ |
Sortie de l'encodeur A |
Signal de l'encodeur A, B, Z entraînement différentiel (26LS31) sortie, sortie non isolée. Si le moteur uniquement avec A, B deux encodeur de canal, puis ignorez Z canal. |
24 |
OA- |
||
25 |
OB+ |
Sortie de l'encodeur B |
|
26 |
OB- |
||
27 |
OZ+ |
Sortie du codeur Z |
|
28 |
OZ- |
||
29 |
République tchèque |
Sortie à collecteur ouvert de l'encodeur Z |
|
30 |
Le GND |
Le sol |
|
6. Ports d'interface d'entrée de signal d'encodeur
Port |
Le symbole |
Définition |
Remarque |
1 |
EA+ |
Entrée du codeur A+ |
Si le moteur n'a que deux encodeurs A et B, ignorez Z. canal. |
11 |
EA- |
Codeur A - Entrée |
|
2 |
EB+ |
Entrée du codeur B+ |
|
12 |
EB- |
Codeur B - Entrée |
|
7 |
EZ+ |
Entrée du codeur Z+ |
|
8 |
EZ- |
Entrée du codeur Z |
|
13 |
CCC |
+5V |
|
3 |
Le GND |
Le sol |
7. Ports d'interface de communication RS232
Port |
Le symbole |
Définition |
1 |
NC |
Non connecté |
2 |
+5V |
Pour HISU externe |
3 |
TXD |
Port de transmission RS232 |
4 |
Le GND |
Le sol |
5 |
RXD |
Port de réception RS232 |
6 |
NC |
Non connecté |
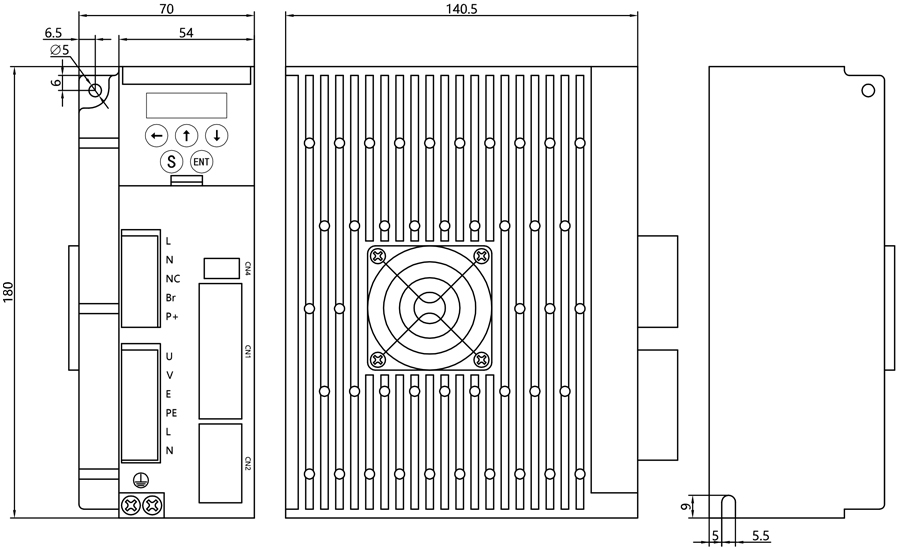
8. Dimensions hors tout (unité = mm)
9.Service sur mesure
Nous proposons une variété d'options de personnalisation dans la conception, telles que le type de vilebrequin en sortie, les connecteurs, les freins, les encodeurs et les boîtes de vitesses, etc. Les utilisateurs peuvent choisir selon leurs besoins réels. Il est également possible de concevoir et de fabriquer des demandes spéciales sur mesure.
10.Options
Fils |
Bride |
L'arbre |
Vis |
|
|
|
|
Encodeur |
Frein |
Boîte de vitesses |
Et Plus |
|
|
|
+ |
11.Certificat
Nous avons obtenu la certification de qualité ISO-9001 et déposé un certain nombre de brevets d'application. Nos produits possèdent des certifications internationales telles que CE et ROHS.

12.Avis

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Tous droits réservés. - Politique de confidentialité










