

Page D’Accueil > Produits > Moteurs Et Périphériques Pas à Pas À Boucle Fermée > Le conducteur de la passoire en boucle fermée

Notre CL57R est un produit d'entraînement pas à pas en boucle fermée basé sur le Modbus RS485 qui prend en charge le protocole Modbus RTU. Ce produit intègre une fonction de contrôleur à axe unique et utilise le protocole de communication de bus Modbus RTU standard pour le contrôle. Il peut monter un maximum de 32 axes et peut réaliser un contrôle synchrone de bus multi-axes. Le pilote dispose d'un contrôle de position, d'un contrôle de vitesse, d'une position interne à 16 segments et d'un contrôle de vitesse interne à 16 segments, d'une prise en charge du retour à zéro, d'un positionnement absolu/relatif, d'un JOG et d'autres fonctions, peut être directement contrôlé à l'aide d'un écran tactile ou d'un contrôleur avec une interface RS485.
1. Caractéristiques
● Prend en charge le protocole Modbus RTU standard sur le bus RS485;
● Pas de perte de pas, positionnement précis;
● La taille du courant est ajustée intelligemment en fonction de la charge pour s'adapter à diverses conditions de charge mécanique;
● Contrôle intégré d'accélération, de décélération et de filtre de lissage pour un fonctionnement plus fluide;
● Segments définis par l'utilisateur;
● Prend en charge les modes de position, de vitesse, de retour à zéro, de JOG, de position multi-étapes, de vitesse multi-étapes et d'autres modes;
● 7 ports d'entrée, 3 fonctions de port de sortie entièrement programmables et configurables;
● Plage de tension : DC+24V~48V;
● Avec protection contre les surintensités, les surtensions, la tolérance de position et d'autres protections;
2.Application typique
Convient à divers équipements et instruments d'automatisation de petite et moyenne taille, tels que les robots industriels, les machines textiles, les machines à coudre industrielles spéciales, les machines à décaper le fil, les machines de marquage, les machines de découpe, les phototypesetting laser, les traceurs, les machines
3.Indicateurs électriques
Alimentation électrique |
DC24~48V, alimentation recommandée DC36V |
Courant de sortie |
Pic 6,0 A (le courant change avec la charge) |
Courant d'entrée DI |
10 à 50 mA |
Tension d'entrée DI |
+24 V CC |
Type de communication |
Résultats |
Taux de communication maximal |
115200bps |
4.Paramètre d'environnement
Méthode de refroidissement |
Refroidissement naturel ou radiateur extérieur |
|
Environnement d'utilisation |
Utilisez les occasions |
Essayez d'éviter la poussière, l'huile et les gaz corrosifs |
Température |
0~40℃ |
|
Humidité |
40 à 90% de RH |
|
Vibration |
5,9 m/s2 Max |
|
Température de stockage |
-20℃~80℃ |
|
5. Port d'entrée d'alimentation
Numéro du terminal |
Le symbole |
Nom |
Donnez un exemple |
1 |
+Vdc |
Résistance à l'alimentation en courant continu |
DC + 24V à 48V Apporte d'alimentation en courant continu + 36 V recommandée |
2 |
Le GND |
Correspondance de la terre |
6. Port moteur
Broche |
Le symbole |
Description |
1 |
A+ |
Un enroulement de moteur de phase + |
2 |
Je suis... |
Un enroulement de moteur de phase- |
3 |
B+ |
Enroulement moteur phase B + |
4 |
Je suis désolé. |
Enroulement du moteur de phase B - |
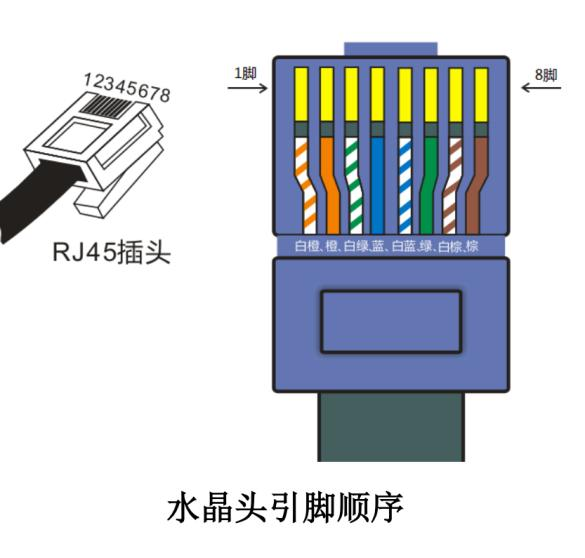
7. Port de communication RS485
Broche |
Définition du signal |
Couleur du câble réseau |
1 |
Résistance à la compression |
blanc et orange |
2 |
- Je ne sais pas. |
se tromper |
3 |
NC |
blanc et vert |
4 |
NC |
bleu |
5 |
Le GND |
blanc et bleu |
6 |
Le GND |
vert |
7 |
NC |
blanc et marron |
8 |
NC |
bRUN |
8.Port d'encodeur
Broche |
Définition |
Donnez un exemple |
1 |
Écran |
Blindage d'encodeur |
2 |
NC |
- Je ne sais pas. |
3 |
NC |
|
4 |
NC |
|
5 |
EVCC |
Borne positive d'alimentation du codeur |
6 |
EGND |
Borne négative de l'alimentation du codeur |
7 |
NC |
|
8 |
NC |
|
9 |
EB+ |
|
10 |
EB- |
|
11 |
EA+ |
|
12 |
EA- |
|
9. Port DI/DO
Numéro du terminal |
Définition du symbole |
Donnez un exemple |
1 |
DI0 |
Port d'entrée à extrémité unique: tension de fonctionnement valable 24V |
2 |
DI1 |
|
3 |
DI2 |
|
4 |
DI3 |
|
5 |
DI4 |
|
6 |
DI5 |
|
7 |
DI6 |
|
8 |
DICOM |
Port d'entrée commun: compatible avec la méthode de connexion commune à l'anode et à la cathode |
9 |
DO0 |
Port de sortie asymétrique |
10 |
DO1 |
|
11 |
DO2 |
|
12 |
DOCOM |
Port de sortie port commun: pôle négatif de l'alimentation |
10.Indication d'état
PWR : indicateur d'alimentation. Lorsque l'appareil est sous tension, le voyant vert est toujours allumé.
ALM : Indicateur de défaut. La lumière rouge clignote une fois en 3 secondes, défaut de surintensité ou court-circuit phase à phase ; La lumière rouge clignote 2 fois consécutivement en 3 secondes, défaut de surtension ; La lumière rouge clignote 7 fois consécutivement en 3 secondes, l'erreur de position dépasse l'alarme de tolérance.
11. Réglage du commutateur DIP
CL57R utilise un interrupteur DIP à 5 chiffres pour définir le numéro de la station de conduite et un interrupteur DIP à 2 chiffres pour définir le débit en bauds de communication.
SW1~SW5 : réglage du numéro de la station de conduite. SW6~SW7 : débit en bauds de communication du conducteur. Le numéro de la station esclave et le débit en bauds de communication doivent être réinitialisés pour prendre effet après modification.
Numéro de la station esclave |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
Par défaut |
Sur |
Sur |
Sur |
Sur |
Sur |
1 |
Éteint |
Sur |
Sur |
Sur |
Sur |
2 |
Sur |
Éteint |
Sur |
Sur |
Sur |
3 |
Éteint |
Éteint |
Sur |
Sur |
Sur |
4 |
Sur |
Sur |
Éteint |
Sur |
Sur |
5 |
Éteint |
Sur |
Éteint |
Sur |
Sur |
6 |
Sur |
Éteint |
Éteint |
Sur |
Sur |
7 |
Éteint |
Éteint |
Éteint |
Sur |
Sur |
8 |
Sur |
Sur |
Sur |
Éteint |
Sur |
9 |
Éteint |
Sur |
Sur |
Éteint |
Sur |
10 |
Sur |
Éteint |
Sur |
Éteint |
Sur |
11 |
Éteint |
Éteint |
Sur |
Éteint |
Sur |
12 |
Sur |
Sur |
Éteint |
Éteint |
Sur |
13 |
Éteint |
Sur |
Éteint |
Éteint |
Sur |
14 |
Sur |
Éteint |
Éteint |
Éteint |
Sur |
15 |
Éteint |
Éteint |
Éteint |
Éteint |
Sur |
16 |
Sur |
Sur |
Sur |
Sur |
Éteint |
17 |
Éteint |
Sur |
Sur |
Sur |
Éteint |
18 |
Sur |
Éteint |
Sur |
Sur |
Éteint |
19 |
Éteint |
Éteint |
Sur |
Sur |
Éteint |
20 |
Sur |
Sur |
Éteint |
Sur |
Éteint |
21 |
Éteint |
Sur |
Éteint |
Sur |
Éteint |
22 |
Sur |
Éteint |
Éteint |
Sur |
Éteint |
23 |
Éteint |
Éteint |
Éteint |
Sur |
Éteint |
24 |
Sur |
Sur |
Sur |
Éteint |
Éteint |
25 |
Éteint |
Sur |
Sur |
Éteint |
Éteint |
26 |
Sur |
Éteint |
Sur |
Éteint |
Éteint |
27 |
Éteint |
Éteint |
Sur |
Éteint |
Éteint |
28 |
Sur |
Sur |
Éteint |
Éteint |
Éteint |
29 |
Éteint |
Sur |
Éteint |
Éteint |
Éteint |
30 |
Sur |
Éteint |
Éteint |
Éteint |
Éteint |
31 |
Éteint |
Éteint |
Éteint |
Éteint |
Éteint |
Remarque : lors de la définition du numéro de station esclave dans le fichier par défaut, vous pouvez définir le numéro de station esclave en définissant le registre de numéro de station esclave du pilote personnalisé (0x0020), compris entre 1 et 31.
Taux de communication en baud |
Le numéro de série |
Le numéro SW7 |
9600 |
Sur |
Sur |
19200 |
Éteint |
Sur |
38400 |
Sur |
Éteint |
115200 |
Éteint |
Éteint |
Remarque : Lorsque le débit en bauds de communication est réglé sur 9600 bps, le format de données du port série est fixé à 8 bits de données, sans parité et 1 bit d'arrêt. Lorsqu'il est réglé sur les trois autres débits en bauds, le format de données du port série est déterminé par le registre de format de données du port série (0x0021).
SW8 : résistance terminale RS485. Le pilote à l'extrémité du bus doit régler ce commutateur DIP sur ON et les autres pilotes sur OFF.
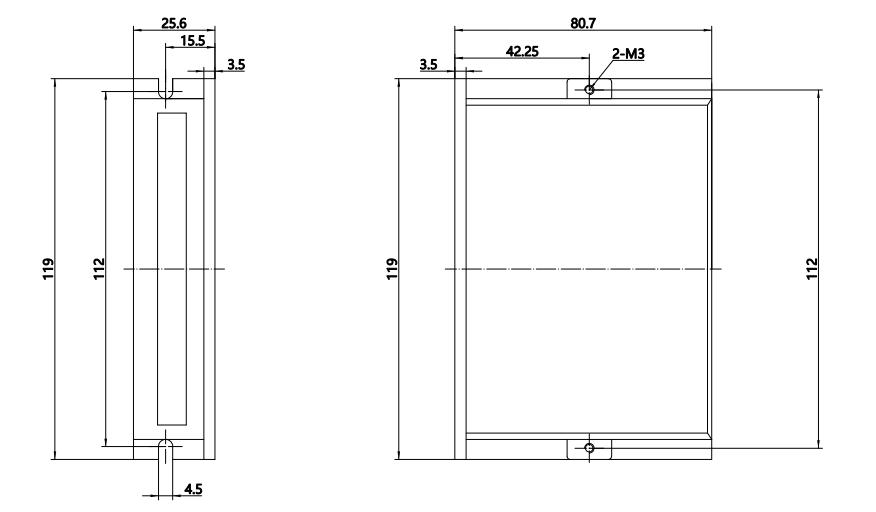
12. Dimensions hors tout (unité = mm)
13.Service sur mesure
Nous proposons une variété d'options de personnalisation dans la conception, telles que le type de vilebrequin en sortie, les connecteurs, les freins, les encodeurs et les boîtes de vitesses, etc. Les utilisateurs peuvent choisir selon leurs besoins réels. Il est également possible de concevoir et de fabriquer des demandes spéciales sur mesure.
14.Options
Fils |
Bride |
L'arbre |
Vis |
|
|
|
|
Encodeur |
Frein |
Boîte de vitesses |
Et Plus |
|
|
|
+ |
15.Certificat
Nous avons obtenu la certification de qualité ISO-9001 et déposé un certain nombre de brevets d'application. Nos produits possèdent des certifications internationales telles que CE et ROHS.

16.Revue

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Tous droits réservés. - Politique de confidentialité










