

Halaman Utama > Produk > motor Servo Stepper Terintegrasi > Motor servo stepper terintegrasi pulsa

ESS57 adalah tipe baru dari sistem servo hibrida penggerak motor terintegrasi dengan kemampuan komunikasi. Ini menggunakan chip ARM berkinerja tinggi 32-bit canggih dan teknologi kontrol tertutup untuk mencegah kehilangan langkah, memastikan ketepatan produk; penurunan torsi pada kecepatan tinggi jauh lebih rendah dibandingkan penggerak loop-terbuka tradisional, secara signifikan meningkatkan kinerja kecepatan tinggi dan torsi motor stepper; ia menggunakan teknologi kontrol arus berbasis beban, secara efektif mengurangi kenaikan suhu motor dan memperpanjang umur motor; mencakup sinyal keluaran peringatan bawaan untuk pemantauan dan kontrol yang mudah oleh komputer induk; fungsi alarm keluar batas posisi memastikan operasi aman dari peralatan pengolahan. Ini merupakan peningkatan ideal dari penggerak stepper loop-terbuka tradisional dan dapat menggantikan beberapa sistem servo AC tradisional dengan harga hanya 50% dari sistem servo AC.
1.Fitur
2.Spesifikasi listrik
Model NO. |
Sudut langkah |
Panjang Motor |
Arus /Phase |
Hambatan /Phase |
Induktansi /Phase |
Torsi tahan |
(°) |
(L) mm |
A |
ω±10% |
mH±20% |
N.M |
|
|
ESS57-15
|
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
|
ESS57P-20
|
1.8 |
76 |
4 |
0.45 |
1.6 |
1.8 |
|
ESS57P-30
|
1.8 |
112 |
4.2 |
0.8 |
3.6 |
3 |
3.Indikator listrik
Pasokan daya |
DC24~48V, catu daya yang direkomendasikan DC36V |
Arus Keluaran |
Puncak 6,0A (arus bervariasi sesuai beban) |
Arus input logika |
7~16mA, disarankan 10mA |
Frekuensi denyut nadi |
0~200KHz |
Nomor baris pengkode |
1000 |
Resistansi isolasi |
≥ 500MΩ |
4.Lingkungan dan parameter penggunaan
Metode Pendinginan |
Pendingin alami atau radiator eksternal |
|
Lingkungan penggunaan |
Gunakan kesempatan |
Cobalah untuk menghindari debu, minyak dan gas korosif |
Suhu |
0~40℃ |
|
Kelembaban |
40 ~ 90% RH |
|
Getaran |
5,9m/s2Max |
|
Suhu penyimpanan |
-20℃~80℃ |
|
5.Definifikasi antarmuka
(1)Port masukan daya
Nomor terminal |
Simbol |
Nama |
Jelaskan |
1 |
+Vdc |
Terminal positif sumber daya DC |
DC + 24V ~ 48V Sumber daya DC + 36V yang direkomendasikan |
2 |
GND |
Catu daya DC tanah |
(2)Port sinyal kontrol
Nomor terminal |
Simbol |
Nama |
Deskripsi |
1 |
PUL+ |
Masukan positif pulsa |
Dukungan 5 ~ 24V |
2 |
PUL- |
Masukan pulsa negatif |
|
3 |
DIR+ |
Masukan positif arah |
|
4 |
DIR- |
Masukan negatif arah |
|
5 |
EN+ |
Aktifkan input positif |
|
6 |
EN- |
Aktifkan input negatif |
|
8 |
AL+ |
Sinyal alarm sedang dikeluarkan |
Output pintu OC memiliki sinyal alarm untuk indikator tertutup secara bawaan, dan tidak ada sinyal alarm untuk indikator terbuka. |
9 |
AL- |
Output negatif sinyal alarm |
(3)Indikasi status
PWR: Lampu indikator daya. Saat dinyalakan, lampu indikator hijau menyala.
ALM: Lampu indikator kesalahan. Lampu merah berkedip satu kali dalam 3 detik: arus berlebih atau kesalahan sirkuit fasa; lampu merah berkedip dua kali secara berturut-turut dalam 3 detik: kesalahan tegangan tinggi; lampu merah berkedip tujuh kali secara berturut-turut dalam 3 detik: kesalahan posisi melebihi batas alarm.
6.Pengaturan saklar DIP
ESS57 Saklar kode enam-bit digunakan untuk menyetel waktu filter, arah putaran motor, dan akurasi subdivisi.
SW1, pengaturan arah putaran motor. on=CW, off=CCW.
SW2, SW3, SW4, SW5: pengaturan subdivisi.
Langkah / lingkaran |
SW2 |
SW3 |
SW4 |
SW5 |
400 |
PADA |
PADA |
PADA |
PADA |
800 |
MATI |
PADA |
PADA |
PADA |
1600 |
PADA |
MATI |
PADA |
PADA |
3200 |
MATI |
MATI |
PADA |
PADA |
6400 |
PADA |
PADA |
MATI |
PADA |
12800 |
MATI |
PADA |
MATI |
PADA |
25600 |
PADA |
MATI |
MATI |
PADA |
51200 |
MATI |
MATI |
MATI |
PADA |
1000 |
PADA |
PADA |
PADA |
MATI |
2000 |
MATI |
PADA |
PADA |
MATI |
4000 |
PADA |
MATI |
PADA |
MATI |
5000 |
MATI |
MATI |
PADA |
MATI |
8000 |
PADA |
PADA |
MATI |
MATI |
10000 |
MATI |
PADA |
MATI |
MATI |
20000 |
PADA |
MATI |
MATI |
MATI |
40000 |
MATI |
MATI |
MATI |
MATI |
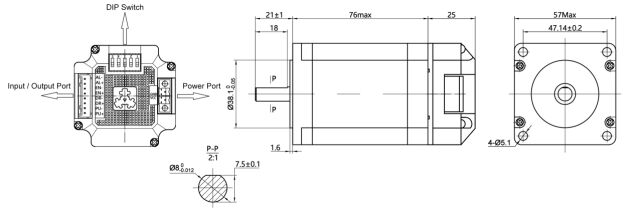
7.Dimension Umum
8.Sertifikat
Kami telah melalui sertifikasi kualitas ISO-9001 dan memperoleh sejumlah paten aplikasi. Produk kami memiliki sertifikasi internasional seperti CE dan ROHS.

9.Ulasan

Hak Cipta © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Seluruh hak dilindungi. - Kebijakan Privasi



