Halaman Utama > Produk > Sistem Servo > Servo motor DC terintegrasi

Motor servo terpadu JSV57 adalah motor DC tanpa sikat dengan ukuran bingkai 57mm yang terintegrasi dengan encoder 16-bit dan penggerak servo. Motor servo DC ini menggunakan chip ARM 32-bit dan teknologi algoritma kontrol yang dioptimalkan, dengan desain unggulan dan ukuran kompak. Desain terpadu dari penggerak dan motor tidak hanya menghemat koneksi antara penggerak dan motor, tetapi juga secara efektif mengurangi gangguan elektromagnetik pada koneksi tersebut. Teknologi anti-getaran yang lebih baik dan pengurangan panas diadopsi, secara efektif menyelesaikan masalah panas dan kebisingan.
1.Fitur
2.Aplikasi Khas
Cocok untuk berbagai peralatan otomatisasi kecil dan menengah serta alat ukur, seperti printer tinta, mesin pahat kecil dan menengah, peralatan pengolahan elektronik, peralatan pegangan otomatis, mesin CNC khusus, peralatan pengemasan, dll. Terutama efektif pada peralatan di mana pengguna mengharapkan tingkat kebisingan rendah dan kecepatan tinggi.
3.Indikator listrik
Parameter |
JSV57 |
|||
Min |
Nilai tipikal |
Max. |
Unit |
|
Arus keluaran terus-meneru |
0 |
- |
6 |
A |
Tegangan suplai daya masukan |
24 |
36 |
48 |
VDC |
Arus input logika |
7 |
10 |
16 |
mA |
Tegangan masukan logika |
5 |
5 |
24 |
V |
Frekuensi denyut nadi |
0 |
- |
200 |
kHz |
Resistansi isolasi |
100 |
|
|
MΩ |
4.Spesifikasi Listrik
Unit |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Fase |
|
3 |
||
Polandia |
|
8 |
||
Tegangan |
|
36VDC |
||
Daya Terukur |
W |
90 |
140 |
180 |
Torsi terukur |
N.M |
0.28 |
0.45 |
0.57 |
Torsi puncak |
N.M |
0.8 |
1.1 |
1.5 |
Kecepatan Terukur |
menit |
3000 |
3000 |
3000 |
Arus Terukur |
A |
3.3 |
5 |
6.6 |
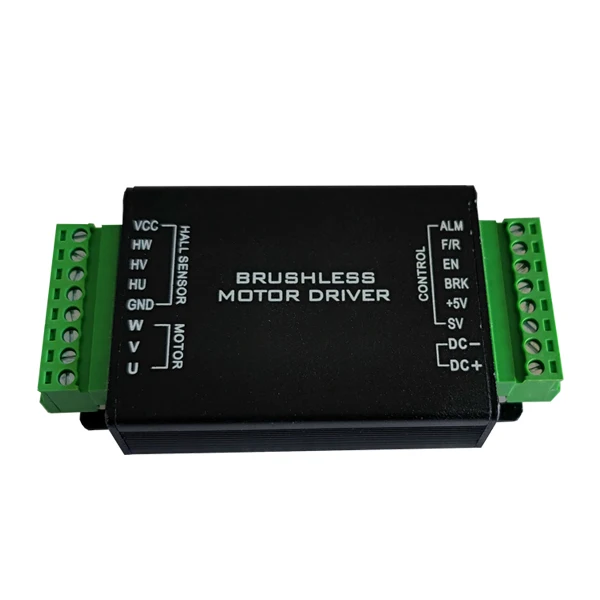
5.Interface penggerak dan pengenalan kabel
(1)Port masukan daya
Nomor terminal |
Simbol |
Nama |
Menjelaskan |
1 |
+Vdc |
Terminal positif daya DC |
DC + 24V ~ 48V |
2 |
GND |
Daya DC tanah |
0V |
(2) Pelabuhan sinyal kontrol
Nomor terminal |
Simbol |
Nama |
Menjelaskan |
1 |
PUL + |
Masukan pulsa + |
Kompatibel dengan sinyal 5V~24V |
2 |
PUL - |
Masukan pulsa - |
|
3 |
DIR + |
Masukan arah + |
|
4 |
DIR - |
Masukan arah - |
|
5 |
ENA + |
Aktifkan masukan + |
|
6 |
ENA - |
Aktifkan masukan - |
|
7 |
PED + |
Output Sinyal Posisi + |
|
8 |
PED - |
Keluaran Sinyal Posisi - |
|
9 |
ALM + |
Keluaran Sinyal Alarm + |
|
10 |
ALM - |
Keluaran Sinyal Alarm - |
(3) RS232 port komunikasi
Nomor terminal |
Simbol |
Nama |
Menjelaskan |
1 |
NC |
|
|
2 |
RX |
Penerima RS232 |
|
3 |
GND |
Power ground |
|
4 |
TX |
Pengirim RS232 |
|
5 |
+5V |
Terminal daya positif |
(Ini tidak perlu dihubungkan) |
(4)Penyataan status
PWR: Indikator Daya. Indikator hijau menyala ketika daya diterapkan.
ALM: Indikator kesalahan. Ketika terjadi kesalahan, indikator berkedip dalam siklus 5 detik; ketika kesalahan diatasi oleh pengguna, LED merah selalu mati. LED merah berkedip dengan frekuensi 2Hz, di mana LED menyala selama 200ms dan mati selama 300ms. Jumlah kali LED merah berkedip dalam 5 detik mewakili informasi kesalahan yang berbeda, dan hubungan spesifik ditunjukkan dalam tabel berikut:
Nomor seri |
Jumlah kedipan |
Deskripsi Kesalahan |
1 |
1 |
Kesalahan over-current |
2 |
2 |
Peringatan kesalahan toleransi posisi |
3 |
3 |
Kesalahan encoder |
4 |
4 |
Overload motor |
5 |
5 |
Bus over-voltage |
6 |
6 |
Tegangan bus rendah |
6.Pengaturan saklar DIP
7.Filtrasi perintah input
Ketika sakelar DIP S1 diatur ke ON, fungsi filter input diaktifkan, dan waktu filter dikonfigurasi oleh register 2603; fungsi ini hanya efektif ketika motor terbuka;
Driver JSV57 menggunakan sakelar DIP enam posisi untuk mengatur presisi subdivisi dan arah rotasi motor.
(1)Pengaturan Arah
Arah |
S2 |
MKB |
MATI |
CW |
PADA |
(2)Pengaturan mikrostep
Pulsa/Rev |
S3 |
S4 |
S5 |
S6 |
Bawaan |
PADA |
PADA |
PADA |
PADA |
400 |
PADA |
PADA |
PADA |
PADA |
800 |
MATI |
PADA |
PADA |
PADA |
1600 |
PADA |
MATI |
PADA |
PADA |
3200 |
MATI |
MATI |
PADA |
PADA |
6400 |
PADA |
PADA |
MATI |
PADA |
12800 |
MATI |
PADA |
MATI |
PADA |
25600 |
PADA |
MATI |
MATI |
PADA |
51200 |
MATI |
MATI |
MATI |
PADA |
1000 |
PADA |
PADA |
PADA |
MATI |
2000 |
MATI |
PADA |
PADA |
MATI |
4000 |
PADA |
MATI |
PADA |
MATI |
5000 |
MATI |
MATI |
PADA |
MATI |
8000 |
PADA |
PADA |
MATI |
MATI |
10000 |
MATI |
PADA |
MATI |
MATI |
20000 |
PADA |
MATI |
MATI |
MATI |
40000 |
MATI |
MATI |
MATI |
MATI |
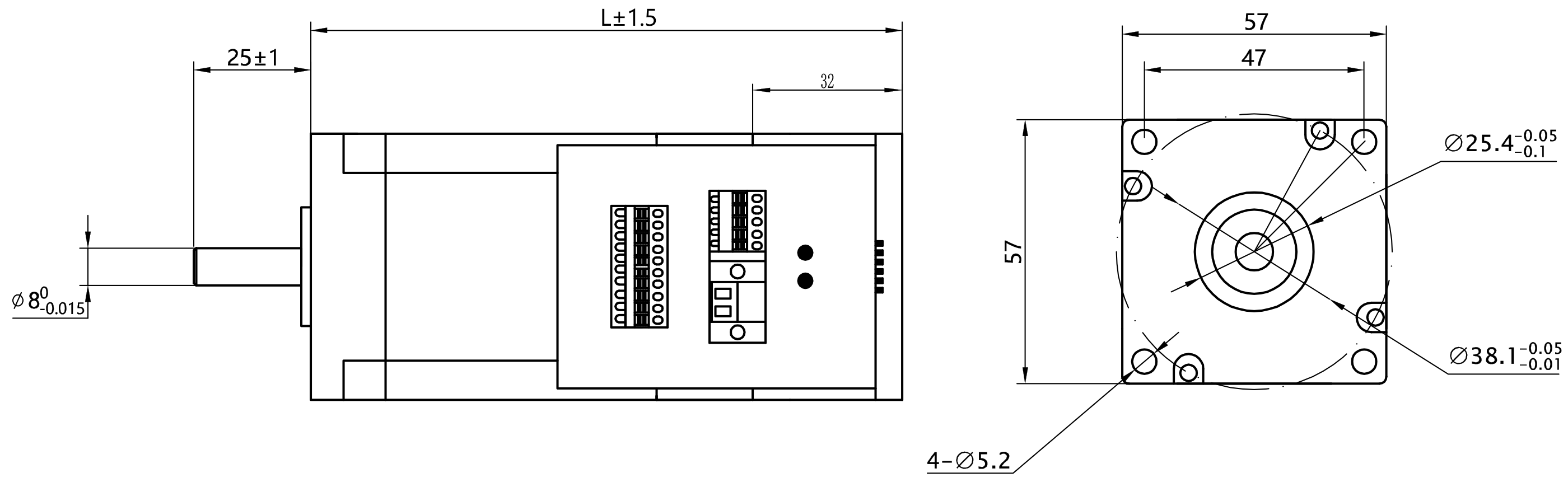
8.Dimensi Motor (unit=mm)
9.Sertifikat
Kami telah melalui sertifikasi kualitas ISO-9001 dan memperoleh sejumlah paten aplikasi. Produk kami memiliki sertifikasi internasional seperti CE dan ROHS.

10.Ulasan

Hak Cipta © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Seluruh hak dilindungi. - Kebijakan Privasi