Pagina Prima > Producta > motores Servi Graduum Integrati > Pulsus Integrated Stepper Servo Motors


JSS86P est innovativum systema hybridum integratum servo-impulsorum cum facultatibus communicationis. Combinat impulsum servo-gradatim et motorem in unum. Technologia clausi circuitus praebet ne gradus amittantur et praecisionem servat. Decrementum momenti torsionis ad altas velocitates multo minus est quam in tradicionalibus impulsoribus aperti circuitus, quod praestantiam motorum gradatim ad altas velocitates et momenti torsionis magnopere augit. Technologia controlis currentis ex onere dependens efficaciter temperaturam motoris minuit, vitam operativam producens. Exsistentiae positionis completarum et signorum alarum internarum facilitant supervisionem et imperium per computatrum principale. Signum alarmis pro positione ultra limites certam operationem machinarum elaborationis tutam facit.
Eigenschaften
Utuntur praestanti 32-bit ARM chippa et technologiae controlis clausi circuitus;
Operatur in modo clausi circuitus sine amissione graduum, sed etiam modo aperti circuitus utitur;
Augebit torque et velocitatem cursus motoris;
Currentis intelligenter adaptatur secundum onus, ut temperatus motoris minor crescat; currentis electromagnetis fixae et currentis pici clausi circuitus regulabilis;
Adaptari potest ad omnes conditiones oneris mechanici (ut pulley cum parva rigiditate et onera pulley), nec parametri guadientis reglandi sunt;
Tempus filtrandi levigationis iussi positionis regi potest, ut motor lenius moveatur, vibratio minuatur, et praestantia dynamica accelerationis ac decelerationis melior fiat;
Post positionem, facultas statica ad zero velocitatis absque vibratione;
Singularem et duplexum impulsuum introitum adiuvat, cum maxima impulsum responsionis frequentia 200 kHz;
Quindecim fixas fractionales divisiones adiuvat et subdivisiones per software definitas (a 200 ad 65535) permittit;
Protocolum Modbus RTU in RS232 adiuvat, ut positio et velocitas per communicationem regantur;
Monitorium conditionum motoris operantis adiuvat, inter quas velocitas, deviatio positionis, tensio bus, et currus operativus;
Intervalum tensionis: CC +24 V ad 80 V;
Habet protectionem contra excessum currentis, excessum tensionis, et deviationem positionis;
Specificationes Electrificae
Numerus Modeli |
Gradus Anglus |
Motor Longitudo |
Current /Phase |
Resistenta /Phase |
Inductantia /Phase |
Tenens Torque |
|
(°) |
(L1) mm |
(L2) mm |
A |
ω±10% |
mH±20% |
N.m |
|
|
JSS86P-4.5N-BC38
|
1.8 |
82 |
128 |
4.5 |
0.7 |
5.5 |
4.5 |
|
JSS86P-6.5N-BC38
|
1.8 |
100 |
145 |
5.0 |
0.5 |
4 |
6.5 |
|
JSS86P-8.5N-BC38
|
1.8 |
118 |
163 |
6.0 |
0.5 |
4.5 |
8.5 |
|
JSS86P-10N-BC38
|
1.8 |
128 |
173 |
6.0 |
0.6 |
5 |
10 |
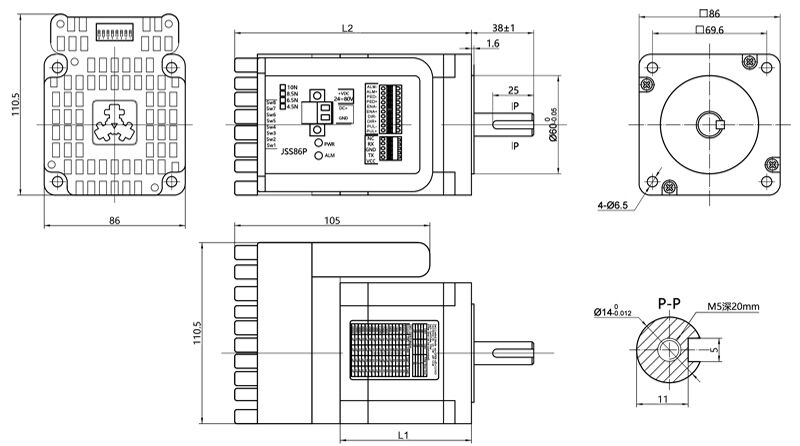
Dimensionum totalium
Indicatores electrica
Fontem electricitatis |
CC+24–80 V, recommendatum est alimentum electricum CC+60 V |
Output Current |
Maxima 7,0 A (intensitas secundum onus variat) |
Logica initus current |
7~16mA, commendatum 10mA |
Pulsus frequency |
0~200KHz |
Linea numeri Encoder |
1000 |
Resistens Insulationis |
≥500MΩ |
Usus ambientis et parameters
Modus refrigerationis |
Naturalis refrigerationem seu externum radiator |
|
Usus environment |
Usus occasione |
Vitanda pulvis, oleum et vapores mordax |
Temperatura |
0~40℃ |
|
Humiditas |
40~90% RH |
|
Vibratio |
5.9m/s2Max |
|
Temperatura recondita |
-20℃~80℃ |
|
Definitio interface
Portus ad introitum potestatis
Terminatio numerus |
Symbolum |
Nomen |
Explicare |
1 |
+Vdc |
Terminalis positivus praebendi potentiae DC |
DC+24V~48V Recommendatum est alimentum electricum CC+60 V |
2 |
GND |
Potestas dc terra |
Portus ad signa regentia
Terminatio numerus |
Symbolum |
Nomen |
Descriptio |
1 |
PUL+ |
Pulsus positivum initus |
Support 5~24V |
2 |
PUL- |
Pulsus negans initus |
|
3 |
DIR+ |
Directionem positivum initus |
|
4 |
DIR- |
Directio negativa initus |
|
5 |
EN+ |
Admitte positivum initus |
|
6 |
EN- |
Admitte negans initus |
|
7 |
PEND+ |
Signum advenientiae emittitur |
Egressus portae OC indicat quod positio clausa est praedefinita, dum positio aperta adhuc non detegitur. |
8 |
PEND- |
Signum adventus, output negativum |
|
9 |
ALM+ |
Signum allarmi activum est |
Output ianuarius OC habet signum alarmis pro indicatore clauso per defectum, et nullum signum alarmis pro indicatore aperto. |
10 |
ALM- |
Output signi allarmi negativi |
Portus communicandi RS232
Terminatio numerus |
Symbolum |
Nomen |
1 |
+5V |
Terminus positivus suppeditationis electricae |
2 |
TxD |
Transmissor RS232 |
3 |
GND |
Terra suppeditationis electricae |
4 |
RxD |
RS232 accipientis |
5 |
NC |
|
Indicatio status
PWR: lucerna indicans potestatem. Lux viridis accenditur, cum potestas adhibetur.
ALM: Lucerna indicativa defectus. Unica flamma rubra in tempore trium secundorum significat supercurrentem aut curtum circuitum inter fases; duae flammae consecutivae in tempore trium secundorum indicant defectum supra tensionem; quinque flammae consecutivae in tempore trium secundorum excitant alarmam erroris positionis.
Configuratio commutatoris DIP
JSS86 utitur interruptore DIP octobitario ad parametrum temporis filtrandi, directionem rotationis motoris et praecisionem subdivisionis constituendum.
SW1 regit electionem modi: positus in (ON) pro controllo in circuitu aperto, positus ex (OFF) pro controllo in circuitu clauso.
SW2 regit directionem rotationis motoris: positus in (CW) pro rotatione dextroversa, positus ex (CCW) pro rotatione sinistrorsa.
SW3–SW4 regunt tempus filtrandi pro iussis positionis. Maius tempus filtrandi certum operatio motoris levioris et soni minuendi efficit. Tempus filtrandi per software computatricis dominantis flexibiliter adiustari potest.
SW3 |
SW4 |
Tempus filtrandi (ms) |
IN |
IN |
0 (Hoc in loco tempus filtrandi per communicationem modificare potes) |
OFF |
IN |
3 |
IN |
OFF |
15 |
OFF |
OFF |
30 |
SW5, SW6, SW7, SW8: Parametri subdivisionis.
Vestigia / circulus |
SW5 |
SW6 |
SW7 |
SW8 |
Praedefinitum |
IN |
IN |
IN |
IN |
800 |
OFF |
IN |
IN |
IN |
1600 |
IN |
OFF |
IN |
IN |
3200 |
OFF |
OFF |
IN |
IN |
6400 |
IN |
IN |
OFF |
IN |
12800 |
OFF |
IN |
OFF |
IN |
25600 |
IN |
OFF |
OFF |
IN |
51200 |
OFF |
OFF |
OFF |
IN |
1000 |
IN |
IN |
IN |
OFF |
2000 |
OFF |
IN |
IN |
OFF |
4000 |
IN |
OFF |
IN |
OFF |
5000 |
OFF |
OFF |
IN |
OFF |
8000 |
IN |
IN |
OFF |
OFF |
10000 |
OFF |
IN |
OFF |
OFF |
20000 |
IN |
OFF |
OFF |
OFF |
40000 |
OFF |
OFF |
OFF |
OFF |
Applicatio
Noster motor passus servus integratus JSS86P idoneus est ad varia instrumenta et apparatus automatizatos parvos et mediocres, ut sunt robotae industriales, machinae textiles, machinae sartoriales industriales speciales, machinae exspoliantes filos, machinae notantes, machinae secantes, systemata typographica laser, graphopictores, ferramenta machinalia CNC, machinae sculpentes, et apparatus coniungendi automatici. Praesertim efficax in applicationibus quae exigunt sonum levem et celeritatem magnam.
Servitium Ad Mensuram
Plurima optionum personalium genera in designo praebemus, ut typum axis output, conectores, frena, encoders et reductiones, etc. Usuarii secundum necessitates reales libere eligere possunt. Item cum petitionibus specialibus personalis designari et confici potest.
Certificatum
Nos iam systema certificationis qualitatis ISO-9001 transivimus et multas patentes applicationis consecuti sumus. Producta nostra certificationes internationales sicut CE et ROHS habent.
|
|
|
|
|
|
|
Review

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Omnia iura reservata. - Politica Privata