

Strona Główna > Produkty > Silniki I Napędniki Krokowe Z Zamkniętym Pętlą > Kierowca stopnika z zamkniętą pętlą

Nasz CL57R to produkt napędu krokowego z zamkniętą pętlą oparty na RS485 Modbus, który obsługuje protokół Modbus RTU. Ten produkt integruje funkcję sterownika jednoosiowego i wykorzystuje standardowy protokół komunikacyjny magistrali Modbus RTU do sterowania. Może zamontować maksymalnie 32 osie i może realizować synchroniczne sterowanie magistralą wieloosiową. Sterownik ma sterowanie położeniem, sterowanie prędkością, 16-segmentową wewnętrzną pozycję i 16-segmentową wewnętrzną kontrolę prędkości, obsługuje powrót do zera, pozycjonowanie bezwzględne/względne, JOG i inne funkcje, może być bezpośrednio sterowany za pomocą ekranu dotykowego lub sterownika z interfejsem RS485.
1.Wyznaczenia
● Wspiera standardowy protokół Modbus RTU na busie RS485;
● Brak utraty kroku, dokładna pozycja;
● Rozmiar prądu jest inteligentnie dostosowywany do obciążenia, aby przystosować się do różnych warunków obciążenia mechanicznego;
● wbudowane sterowanie przyspieszeniem, hamowaniem i wygładzającym filtrem dla płynniejszego działania;
● Segментy zdefiniowane przez użytkownika;
● Wsparcie dla trybów pozycji, prędkości, powrotu do zera, JOG, wielostopniowej pozycji, wielostopniowej prędkości i innych;
● 7 portów wejściowych, 3 porty wyjściowe, wszystkie funkcje programowalne i konfigurowalne;
● Zakres napięcia : DC+24V~48V;
● Z ochroną przed przekroczeniem prądu, napięcia, tolerancją pozycji i innymi ochronami;
2. Typowe zastosowanie
Przeznaczony do różnych urządzeń i przyrządów automatycznych małych i średnich, takich jak roboty przemysłowe, maszyny tekstylne, specjalne maszyny szwacznicze przemysłowe, maszyny do obnażania przewodów, maszyny do oznaczania, maszyny do cięcia, laserowa fototypografia, spiskarki, maszyny CNC, maszyny do wycinania, automatyczne urządzenia montażowe itp. Efekt zastosowania jest szczególnie dobry w urządzeniach, gdzie użytkownicy liczą na niski poziom hałasu i wysoką prędkość.
3.Wskaźniki elektryczne
Zasilacz |
W przypadku gdy nie ma żadnych dodatkowych mocy, należy zastosować następujące warunki: |
Prąd wyjściowy |
Szczyt 6,0 A (prąd zmienia się wraz z obciążeniem) |
Prąd wejściowy DI |
10~50mA |
Napięcie wejściowe DI |
+24VDC |
Rodzaj komunikacji |
RS485 |
Maksymalna prędkość komunikacji |
115200bps |
4. Parametry środowiskowe
Metoda chłodzenia |
Naturalne chłodzenie lub radiator zewnętrzny |
|
Środowisko użytkowania |
Używaj okazji |
Staraj się unikać kurzu, oleju i korozyjnych gazów |
Temperatura |
0~40℃ |
|
Wilgotność |
40~90% RH |
|
Wibracja |
5,9 m/s2 Maksymalnie |
|
Temperatura przechowywania |
-20℃~80℃ |
|
5. Port wejściowy zasilania
Numer terminala |
Symbol |
Imię i nazwisko |
Zilustrować |
1 |
+Vdc |
Pozytywny końcowy zasilacz prądu stałego |
Prąd stały + 24V ~ 48V Zalecane zasilanie prądem stałym + 36V |
2 |
GND |
Ziemia zasilania prądem stałym |
6. Port silnikowy
Pin |
Symbol |
Opis |
1 |
A+ |
Uzwojenie silnika fazowego + |
2 |
A- |
Uzwojenie silnika fazowego |
3 |
B+ |
Uzwojenie silnika fazy B + |
4 |
B- |
Uzwojenie silnika fazy B - |
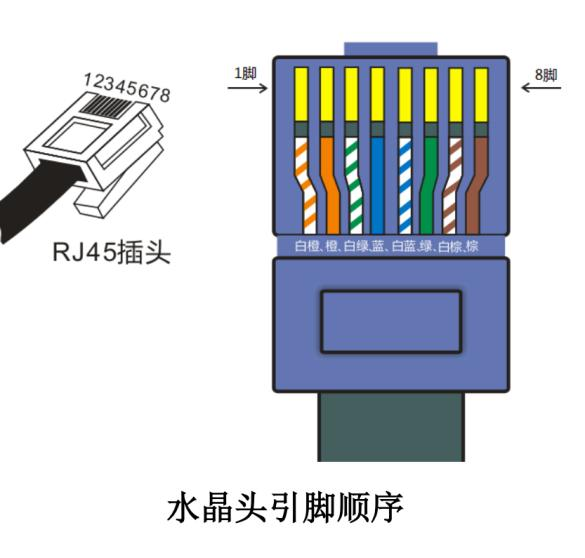
7.Port komunikacyjny RS485
Pin |
Definicja sygnału |
Kolor kabla sieciowego |
1 |
RS485+ |
biały i pomarańczowy |
2 |
RS485- |
wąwóz |
3 |
NC |
biały i zielony |
4 |
NC |
niebieski |
5 |
GND |
biały i niebieski |
6 |
GND |
zielony |
7 |
NC |
biały i brązowy |
8 |
NC |
brązowy |
8.Port enkodera
Pin |
Definicja |
Zilustrować |
1 |
Osłona |
Osłona enkodera |
2 |
NC |
RS485- |
3 |
NC |
|
4 |
NC |
|
5 |
EVCC |
Zacisk dodatni zasilania enkodera |
6 |
EGND |
Zacisk ujemny zasilania enkodera |
7 |
NC |
|
8 |
NC |
|
9 |
EB+ |
|
10 |
EB- |
|
11 |
EA+ |
|
12 |
EA- |
|
9.Port DI/DO
Numer terminala |
Definicja symbolu |
Zilustrować |
1 |
DI0 |
Port wejściowy jednokierunkowy: dopuszczalne napięcie pracy 24V |
2 |
DI1 |
|
3 |
DI2 |
|
4 |
DI3 |
|
5 |
DI4 |
|
6 |
DI5 |
|
7 |
DI6 |
|
8 |
DICOM |
Wspólny port wejściowy: zgodny z metodami połączenia anody wspólnej i katody wspólnej |
9 |
Zrób0 |
Port wyjściowy jednostronny |
10 |
DO1 |
|
11 |
DO2 |
|
12 |
DOCOM |
Wspólny port wyjściowy: ujemny biegun źródła zasilania |
10. Wskaźnik statusu
PWR: Wskaźnik zasilania. Gdy zasilanie jest włączone, zielona kontrolka jest zawsze włączona.
ALM: Wskaźnik awarii. Czerwone światło migocze raz w ciągu 3 sekund, awaria przekroczenia prądu lub krótkiego obwodu fazowego; Czerwone światło migocze dwukrotnie w ciągu 3 sekund, awaria przekroczenia napięcia; Czerwone światło migocze siedmiokrotnie w ciągu 3 sekund, błąd pozycji przekracza alarm tolerancji.
11.Ustawienie przełącznika DIP
CL57R używa 5-cyfrowego przełącznika DIP do ustawienia numeru stacji sterownika i 2-cyfrowego przełącznika DIP do ustawienia szybkości transmisji danych komunikacyjnej.
SW1~SW5: ustawienie numeru stacji sterownika. SW6~SW7: szybkość transmisji danych komunikacyjnej sterownika. Numer stacji podrzędnej i szybkość transmisji danych muszą zostać ponownie uruchomione, aby zmiany zostały zastosowane po wprowadzeniu modyfikacji.
Numer stacji podrzędnej |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
Domyślny |
NA |
NA |
NA |
NA |
NA |
1 |
Zwolnione |
NA |
NA |
NA |
NA |
2 |
NA |
Zwolnione |
NA |
NA |
NA |
3 |
Zwolnione |
Zwolnione |
NA |
NA |
NA |
4 |
NA |
NA |
Zwolnione |
NA |
NA |
5 |
Zwolnione |
NA |
Zwolnione |
NA |
NA |
6 |
NA |
Zwolnione |
Zwolnione |
NA |
NA |
7 |
Zwolnione |
Zwolnione |
Zwolnione |
NA |
NA |
8 |
NA |
NA |
NA |
Zwolnione |
NA |
9 |
Zwolnione |
NA |
NA |
Zwolnione |
NA |
10 |
NA |
Zwolnione |
NA |
Zwolnione |
NA |
11 |
Zwolnione |
Zwolnione |
NA |
Zwolnione |
NA |
12 |
NA |
NA |
Zwolnione |
Zwolnione |
NA |
13 |
Zwolnione |
NA |
Zwolnione |
Zwolnione |
NA |
14 |
NA |
Zwolnione |
Zwolnione |
Zwolnione |
NA |
15 |
Zwolnione |
Zwolnione |
Zwolnione |
Zwolnione |
NA |
16 |
NA |
NA |
NA |
NA |
Zwolnione |
17 |
Zwolnione |
NA |
NA |
NA |
Zwolnione |
18 |
NA |
Zwolnione |
NA |
NA |
Zwolnione |
19 |
Zwolnione |
Zwolnione |
NA |
NA |
Zwolnione |
20 |
NA |
NA |
Zwolnione |
NA |
Zwolnione |
21 |
Zwolnione |
NA |
Zwolnione |
NA |
Zwolnione |
22 |
NA |
Zwolnione |
Zwolnione |
NA |
Zwolnione |
23 |
Zwolnione |
Zwolnione |
Zwolnione |
NA |
Zwolnione |
24 |
NA |
NA |
NA |
Zwolnione |
Zwolnione |
25 |
Zwolnione |
NA |
NA |
Zwolnione |
Zwolnione |
26 |
NA |
Zwolnione |
NA |
Zwolnione |
Zwolnione |
27 |
Zwolnione |
Zwolnione |
NA |
Zwolnione |
Zwolnione |
28 |
NA |
NA |
Zwolnione |
Zwolnione |
Zwolnione |
29 |
Zwolnione |
NA |
Zwolnione |
Zwolnione |
Zwolnione |
30 |
NA |
Zwolnione |
Zwolnione |
Zwolnione |
Zwolnione |
31 |
Zwolnione |
Zwolnione |
Zwolnione |
Zwolnione |
Zwolnione |
Uwaga: Podczas ustawiania numeru stacji podrzędnej w pliku domyślnym można zdefiniować numer stacji podrzędnej, ustawiając niestandardowy rejestr numeru stacji podrzędnej sterownika (0x0020) w zakresie od 1 do 31.
Prędkość przekazu |
SW6 |
SW7 |
9600 |
NA |
NA |
19200 |
Zwolnione |
NA |
38400 |
NA |
Zwolnione |
115200 |
Zwolnione |
Zwolnione |
Uwaga: Gdy szybkość transmisji danych jest ustawiona na 9600bps, format danych portu szeregowego jest ustalony na 8 bitów danych, bez parzystości, oraz 1 bit stopu. Gdy jest ustawiona na pozostałe trzy szybkości transmisji danych, format danych portu szeregowego jest określany przez rejestr formatu danych portu szeregowego (0x0021).
SW8: rezystor końcowy RS485. Sterownik na końcu magistrali musi ustawić ten przełącznik DIP na ON, a pozostałe sterowniki na OFF.
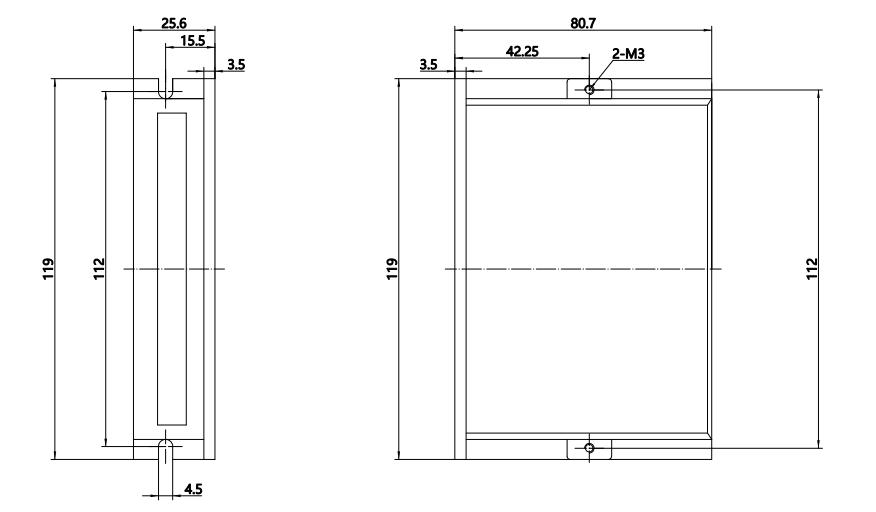
12. Wymiary całkowite (jednostka = mm)
13.Niestandardowy Serwis
Ofiarowujemy wiele opcji dostosowywania w projekcie, takie jak rodzaj wału wyjściowego, łączniki, hamulce, enkodery i bębny zębate itp. Użytkownicy mogą swobodnie wybierać zgodnie z rzeczywistymi potrzebami. Możliwe jest również zaprojektowanie i wykonanie zgodnie ze specjalnymi wymaganiami indywidualnymi.
14.Opcje
Przewody |
Flanga |
Wał |
Śruba |
|
|
|
|
Kodownik |
Hamulec |
Skrzynia biegów |
I Więcej |
|
|
|
+ |
15.Certyfikat
Przechodzimy procedurę certyfikacji jakości ISO-9001 i otrzymaliśmy wiele patentów aplikacyjnych. Nasze produkty mają międzynarodowe certyfikaty, takie jak CE i ROHS.

16.Przegląd

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Wszelkie prawa zastrzeżone. - Polityka prywatności










