

В последние годы, благодаря быстрому развитию силовой электроники и широкому внедрению интеллектуальных и автоматизированных машин, технология электродвигателей вступила в новую эру. Высокоточные отрасли, такие как производство электроники, медицинское оборудование, аэрокосмическая промышленность и робототехника, предъявляют всё более жесткие требования к производительности двигателей — особенно в отношении точности скорости, стабильности крутящего момента, шумоподавления и долгосрочной надежности.
На этом фоне бесщеточный двигатель постоянного тока с постоянными магнитами (BLDC Motor) стал одним из основных и наиболее надежных решений на мировом рынке.
Почему выбирают бесщеточный двигатель постоянного тока? — Точность, производительность и долговечность в одном устройстве
По сравнению со щеточными двигателями постоянного тока, BLDC-двигатели не имеют механических щеток и используют электронную коммутацию, что обеспечивает значительные преимущества:
Благодаря этим характеристикам двигатели BLDC широко используются в БПЛА, робототехнике, транспортных средствах AGV, вентиляторах, электроинструментах, компрессорах, насосах и умных устройствах главная приборов.
Внутренняя структура бесщеточного двигателя постоянного тока с постоянными магнитами
BLDC-двигатель представляет собой трехфазный двигатель, питаемый от источника постоянного тока и управляющийся с помощью электронной коммутации. Он состоит в основном из:


В зависимости от метода определения положения ротора, BLDC-двигатели можно разделить на два типа:
1. Бесщеточные двигатели постоянного тока с датчиком Холла (BLDC с датчиками)
Оснащены датчиками положения (например, датчиками Холла) для контроля положения магнитных полюсов ротора. Микроконтроллер выполняет точную коммутацию на основе сигнала датчика.
Идеально для:
2. Бесщеточные двигатели постоянного тока без датчиков
Положение ротора определяется по обратной ЭДС обмоток.
Преимуществ включают:
Оба типа бесщеточных двигателей постоянного тока могут быть полностью адаптированы под ваши требования по напряжению, крутящему моменту, значению KV, габаритам, типу вала и проводке.
Принцип намотки двигателя и коммутации
Статор содержит шесть катушек, образующих три пары обмоток (фазы A, B, C). В каждом цикле под напряжением находятся только две фазы. Последовательности коммутации следующие:
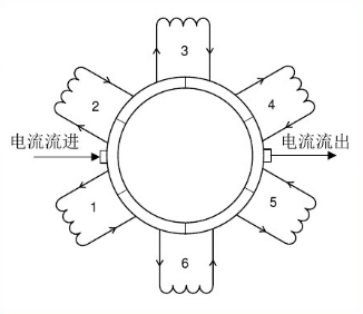
Для минимизации потерь и максимизации крутящего момента коммутация должна происходить тогда, когда магнитное поле статора перпендикулярно магнитному полю ротора — это критически важно для достижения высокой производительности в бесщёточных двигателях постоянного тока (BLDC).
Формулы производительности двигателя (часто задаваемые покупателями вопросы)
1. Формула скорости
n = 60f / P
n: скорость (об/мин) f: электрическая частота P: количество пар полюсов
2. Формула крутящего момента
T = 9550P / n
T: крутящий момент (Н·м) P: выходная мощность (кВт) n: скорость (об/мин)
Например:
Наша инженерная команда может помочь с выбором двигателя на основе требуемых крутящего момента, мощности и скорости
Применение: от промышленных систем до потребительской электроники
Благодаря высокой эффективности и надежности, бесщеточные двигатели с постоянными магнитами используются в следующих областях:
Независимо от того, является ли ваш приоритет низкий уровень шума, высокая скорость, стабильность или долговечность, двигатель BLDC остается наилучшим выбором.
Наши преимущества как профессионального поставщика двигателей BLDC
Мы стремимся предоставлять клиентам по всему миру высокопроизводительные, точные и надежные решения на основе бесщеточных двигателей постоянного тока для длительной эксплуатации.
Авторские права © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Все права защищены. - Политика конфиденциальности