

หน้าแรก > ผลิตภัณฑ์ > มอเตอร์สเต็ปเปอร์และไดรเวอร์ > เครื่องขับขี่ stepper

DM422 ของเราเป็นเครื่องขับขี่ stepper ดิจิตอลที่มีประสิทธิภาพสูง ซึ่งใช้ DSP และอัลการิทึมควบคุมที่ทันสมัย มอเตอร์สเตปเปอร์ที่ขับโดย DM422 สามารถทํางานได้ด้วยเสียงน้อยกว่ามากและสั่นน้อยกว่ามากในรถขับอื่น ๆ ในตลาด เครื่องขับขี่ DM422 มีคุณสมบัติเสียงลดลง, สั่นต่ําลง, และความร้อนต่ําลง ความแรงกดของตัวขับ stepper คือ DC 20V ~ 40V มันเหมาะสําหรับมอเตอร์ 2 ขั้น Hybrid Stepper ทั้งหมดที่มีกระแสไฟฟ้าต่ํากว่า 2.2A จํานวนขั้นตอนสูงสุดของ DM422 คือ 6400 ขั้นตอน/rev (microstep คือ 1/32 ). ระยะการกระแสของมันคือ 0.5A ~ 2.2A DM422 มีการป้องกันการไหลผ่านครึ่งอัตโนมัติ ความดันเกิน ความดันต่ํา และความดันเกิน เครื่องขับขี่ DM422 ของเราสามารถนําไปใช้ในอุปกรณ์และเครื่องมืออัตโนมัติขนาดเล็กต่างๆ เช่น เครื่องติดป้าย เครื่องตัด เครื่องบรรจุ เครื่องวาด เครื่องฉลาก เครื่อง CNC และอื่นๆ
1.ลักษณะ
● การนํา DSP 32 บิต มาใช้งาน เทคโนโลยีการแบ่งย่อยคลื่นไซน์ซีนส์
● เสียง เสียง สั่น และ อุณหภูมิ ที่ เติบโต ต่ํา
● โลเตจ 20 ~ 40VDC
● ด้วย 8 สต็อต การตั้งค่ากระแสไฟฟ้าออก, กระแสไฟฟ้าสูงสุด 2.2A
● มี 4 ตู้วางการแบ่งแยกขนาดเล็ก
● การ ป้องกัน ผ่าน พลังงาน ไฟฟ้า กลาง ผ่าน พลังงาน ไฟฟ้า
● การแยกแสงภายใน ความถี่สูงสุด 200KHZ
● เหมาะสําหรับปัจจุบัน 0.5 ~ 2.2A 2 โฟส, 4 โฟส ไฮบริดมอเตอร์ stepper
2.การเลือกความละเอียดของไมโครสเตป
อัมพวาส/REV |
SW5 |
SW6 |
ค่าเริ่มต้น |
บน |
บน |
1600 |
ส่ง |
บน |
3200 |
บน |
ส่ง |
6400 |
ส่ง |
ส่ง |
ปริมาตรฐาน: จันทร์สามารถปรับเปลี่ยนตามความต้องการของลูกค้า
3.การตั้งค่าปัจจุบัน
สูงสุด |
RMS |
SW1 |
SW2 |
SW3 |
ค่าเริ่มต้น |
บน |
บน |
บน |
|
0.5A |
0.35A |
ส่ง |
บน |
บน |
0.70A |
0.50A |
บน |
ส่ง |
บน |
1.0A |
0.70A |
ส่ง |
ส่ง |
บน |
1.30A |
0.90A |
บน |
บน |
ส่ง |
1.60A |
1.20A |
ส่ง |
บน |
ส่ง |
1.90A |
1.40A |
บน |
ส่ง |
ส่ง |
2.20A |
1.60A |
ส่ง |
ส่ง |
ส่ง |
ผู้ใช้สามารถตั้งค่า stepper driver half flow function โดย SW4 "OFF" แสดงว่ากระแสที่พักผ่อนถูกตั้งเป็นครึ่งของกระแสที่ไดนามิก "ON" แสดงว่ากระแสที่หยุดและกระแสที่ไดนามิกเหมือนกัน ผู้ใช้ควรตั้ง SW4 เป็น "OFF" เพื่อลดการอุ่นเครื่องของมอเตอร์และคนขับ และเพิ่มความน่าเชื่อถือ
4.อธิบายอินเตอร์เฟส
สัญญาณ |
ฟังก์ชัน |
คำอธิบาย |
PWR |
ไฟชี้วัด |
ตัวแสดงพลังงานเป็นสีเขียว เมื่อเครื่องขับขี่ stepper เปิดไฟไฟสีเขียวจะส่องอยู่เสมอ ตัวแสดงความผิดพลาดเป็นสีแดง เมื่อมีความแรงดันเกินหรือความผิดพลาดในระยะเกินไฟฟ้าไฟแดงจะส่องเสมอ หลังจากที่ความผิดพลาดของคนขับถูกกําจัด ถ้าเปิดไฟใหม่ไฟแดงจะดับ |
PUL |
อินเตอร์เฟซสัญญาณ |
PUL คือการเข้าปริมาณแรงกระแทกการตั้งค่า; DIR คือการเข้าทิศทางของมอเตอร์สเตปเปอร์; OPTO คือการให้พลังงานสําหรับประตูสัญญาณ + 5V; ENA คือการเข้าที่ว่างจากมอเตอร์ |
DIR | ||
OPTO | ||
ENA | ||
GND |
อินเตอร์เฟซพลังงาน |
เครื่องขับขี่ stepper ใช้ไฟฟ้า DC ความดันการทํางานที่แนะนําคือ 20VDC ~ 40VDC และการบริโภคพลังงานควรมากกว่า 100W |
+Vdc | ||
A+ |
อินเตอร์เฟซมอเตอร์ |
A+ และ A- เชื่อมต่อกับการล่อระยะของมอเตอร์; B+ และ B เชื่อมต่อกับการล่อระยะอื่นของมอเตอร์ ถ้าต้องการย้อนหลัง, หนึ่งในระยะการล่อสามารถย้อนกลับ |
A- | ||
B+ | ||
B- |
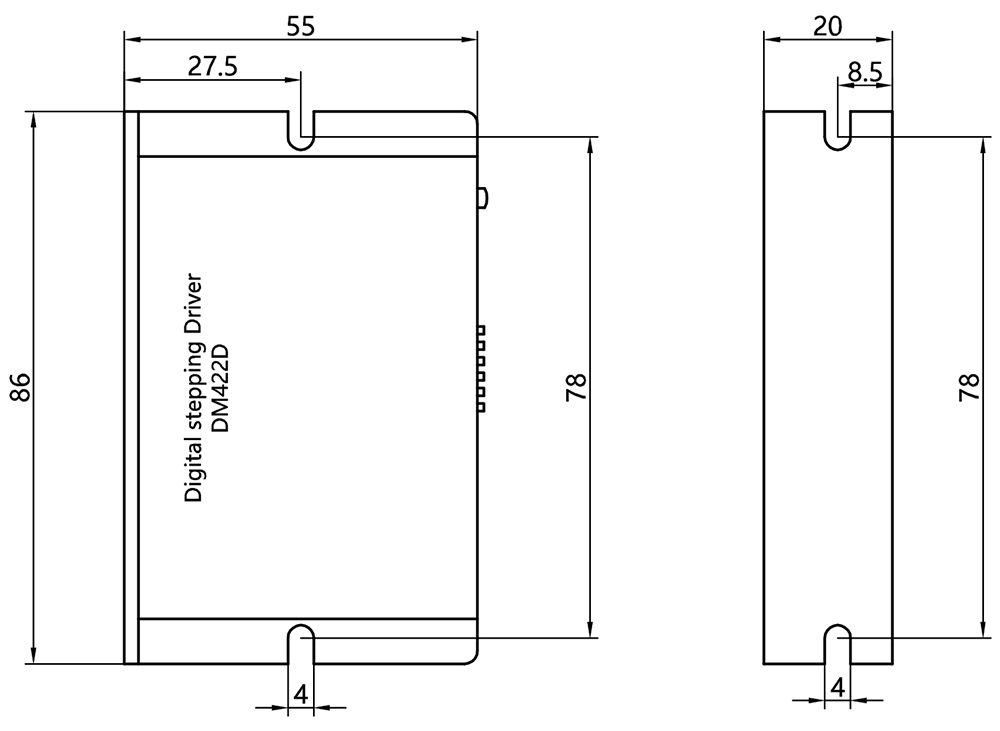
5.มิติทั่วไป
6.บริการลูกค้า
เราให้บริการตัวเลือกในการปรับแต่งหลากหลายในด้านการออกแบบ เช่น ประเภทแกนขับออก ตัวเชื่อมต่อ เบรค เอนコーダ และเกียร์ เป็นต้น ผู้ใช้สามารถเลือกได้อย่างยืดหยุ่นตามความต้องการจริง นอกจากนี้ยังสามารถออกแบบและผลิตตามคำขอพิเศษเฉพาะได้อีกด้วย
7.ตัวเลือก
สายไฟ |
แหวนยึด |
ด้ามจับ |
สกรู |
|
|
|
|
ตัวเข้ารหัส |
เบรก |
เกียร์บ็อกซ์ |
และอื่นๆ อีกมากมาย |
|
|
|
+ |
8.ใบรับรอง
เราได้ผ่านระบบการรับรองคุณภาพ ISO-9001 และได้รับสิทธิบัตรการใช้งานจำนวนหนึ่ง ผลิตภัณฑ์ของเราได้รับการรับรองระดับนานาชาติ เช่น CE และ ROHS

9.รีวิว

ลิขสิทธิ์ © 2026 บริษัทฉางโจวจินซานซือเม่ย์จีอีเล็คโทรนิคส์ จำกัด ทั้งหมดสงวนสิทธิ์ - นโยบายความเป็นส่วนตัว










