หน้าแรก > ผลิตภัณฑ์ > มอเตอร์สเต็ปเปอร์และไดรเวอร์ > เครื่องขับขี่ stepper

STD3722 ของเราเป็นเครื่องขับเคลื่อนมอเตอร์ stepper หลักฐานการควบคุม DSP มอเตอร์สเตปเปอร์ที่ขับโดย STD3722 สามารถทํางานได้ด้วยเสียงน้อยกว่ามากและสั่นน้อยกว่ามากในรถขับอื่น ๆ ในตลาด และความแม่นยําในการตั้งตําแหน่งสามารถถึง 60,000 ขั้นตอน/การปฏิวัติ เครื่องขับขี่ stepper นี้ถูกใช้อย่างแพร่หลายในอุปกรณ์ CNC ขนาดใหญ่และกลางที่มีความละเอียดสูง เช่น เครื่องแกรฟ, เครื่องมือ CNC ขนาดกลาง, เครื่องจักรการขีดคอมพิวเตอร์ และเครื่องจักรการบรรจุ.
1.ลักษณะ
● เครื่องขับขี่ stepper ดิจิตอล 3 ขั้นตอน ใช้เทคโนโลยี DSP 32 บิต
● เสียง เสียง สั่น และ อุณหภูมิ ที่ เติบโต ต่ํา
● โลเตจ 110V ~ 220VAC
● ด้วยการตั้งค่ากระแสไฟฟ้าออก 8 สตาน, กระแสไฟฟ้าสูงสุด 7.0A
● ด้วย 16 ที่วาง microstep การตั้งค่าการแบ่งย่อย ความละเอียดสูงสุดของ 60000 ขั้นตอน / รอบ
● การ ป้องกัน ผ่าน พลังงาน ไฟฟ้า กลาง ผ่าน พลังงาน ไฟฟ้า
● การแยกแสงภายใน ความถี่ตอบสนองสูงสุดถึง 200Kpps
● เหมาะสําหรับมอเตอร์สเตปเปอร์ 3 ขั้น Nem42 Nem52
● เมื่อกระแทกกระแทกหยุดมากกว่า 100ms กระแสของโค้ลจะลดลงเป็นทางอัตโนมัติเป็นครึ่งของกระแสที่ตั้ง
● ความกระชับของสัญญาณ: 5V ~ 24V รองรับ
● อุณหภูมิการทํางาน: -30 °C ~ 85 °C
2.การเลือกความละเอียดของไมโครสเตป
อัมพวาส/REV |
D1 |
D2 |
D3 |
D4 |
400 |
บน |
บน |
บน |
บน |
500 |
บน |
บน |
บน |
ส่ง |
600 |
บน |
บน |
ส่ง |
บน |
800 |
บน |
บน |
ส่ง |
ส่ง |
1000 |
บน |
ส่ง |
บน |
บน |
1200 |
บน |
ส่ง |
บน |
ส่ง |
2000 |
บน |
ส่ง |
ส่ง |
บน |
3000 |
บน |
ส่ง |
ส่ง |
ส่ง |
4000 |
ส่ง |
บน |
บน |
บน |
5000 |
ส่ง |
บน |
บน |
ส่ง |
6000 |
ส่ง |
บน |
ส่ง |
บน |
10000 |
ส่ง |
บน |
ส่ง |
ส่ง |
12000 |
ส่ง |
ส่ง |
บน |
บน |
20000 |
ส่ง |
ส่ง |
บน |
ส่ง |
30000 |
ส่ง |
ส่ง |
ส่ง |
บน |
60000 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
3.การตั้งค่าปัจจุบัน
ปัจจุบัน |
D1 |
D2 |
D3 |
D4 |
1.2A |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
1.5A |
ส่ง |
ส่ง |
ส่ง |
บน |
2.0A |
ส่ง |
ส่ง |
บน |
ส่ง |
2.3A |
ส่ง |
ส่ง |
บน |
บน |
2.5A |
ส่ง |
บน |
ส่ง |
ส่ง |
3.0A |
ส่ง |
บน |
ส่ง |
บน |
3.2A |
ส่ง |
บน |
บน |
ส่ง |
3.6A |
ส่ง |
บน |
บน |
บน |
D5: ON, double pulse: PU คือสัญญาณกระแสกระแสกระแสไปข้างหน้า, DR คือสัญญาณกระแสกระแสกลับ; OFF, single pulse: PU คือสัญญาณกระแสกระแสกระแส, DR คือสัญญาณควบคุมทิศทาง
D6: สวิตช์การตรวจจับอัตโนมัติ (ปิดเมื่อได้รับแรงกระแทกภายนอก, ON ดรൈവ์ความเร็วภายใน 30 r / min)
4.ท่าทางสัญญาณ (DB15) คําอธิบาย
การนิยามท่าเรือ |
หมายเลข PIN |
สัญลักษณ์ |
คุณสมบัติ |
คําบรรยาย |
RS-232 |
1 |
RX |
รับข้อมูล |
เชื่อมต่อกับพอร์ต TX ของตัวควบคุม (หน้าที่ยังคง) |
2 |
TX |
ส่งข้อมูล |
เชื่อมต่อกับพอร์ต RX ของตัวควบคุม (หน้าที่ยังคง) |
|
8 |
GND |
สายพื้นดิน |
เชื่อมต่อกับสายพื้นที่พานควบคุม (การรักษาฟังก์ชัน) |
|
|
DB15 |
1 |
PU+ |
สายท้ายบวกของสัญญาณแรงผลักดันการเข้า |
ติดต่อสัญญาณไฟฟ้า +5V ~ +24V สามารถขับเคลื่อน |
2 |
พีเอส- |
DP5=OFF, PU คือสัญญาณกระแทกขั้นตอน |
ขอบตกลงเป็นค่าที่ใช้ได้ เมื่อสัญญาณพัลส์เปลี่ยนจากสูงไปต่ำ มอเตอร์จะเคลื่อนที่หนึ่งก้าว และตัวต้านทานภายในที่จำกัดกระแส 220Ω จำเป็นต้องมี: ระดับต่ำ 0~0.5V, ระดับสูง 24V หรือน้อยกว่า, ความกว้างของพัลส์ 2.5μS |
|
DP5=ON, PU คือสัญญาณปริมาณกระแทกระยะขั้นขั้นบวก | ||||
3 |
DR+ |
สัญญาณทิศทางการเข้า ทอร์มิเนลบวก |
เชื่อมต่อสัญญาณไฟฟ้า + 5V ~ + 24V สามารถขับเคลื่อน |
|
4 |
DR- |
DP5=OFF, DR คือสัญญาณปริมาณทิศทาง |
ใช้สำหรับเปลี่ยนทิศทางของมอเตอร์ ข้อกำหนด: ระดับต่ำ 0-0.5V, ระดับสูง 24V หรือน้อยกว่า, ความกว้างของพัลส์ 2.5μS |
|
DP5=ON, DR คือสัญญาณแรงผลักกลับ | ||||
|
5 |
MF+ |
สัญญาณการปล่อยมอเตอร์เข้า (สัญญาณเปิด) ปลายบวก |
ติดต่อสัญญาณไฟฟ้า +5V ~ +24V สามารถขับเคลื่อน |
|
|
6 |
MF- |
สัญญาณปล่อยมอเตอร์ (สัญญาณเปิด) ปลายลบ |
เมื่อมอเตอร์ปิดพลังงานและคนขับหยุดทํางาน, มอเตอร์อยู่ในสภาพอิสระ |
|
7 |
NC |
|
ไม่ใช้ |
|
8 |
NC |
|
ไม่ใช้ |
|
9 |
ALM+ |
สัญญาณออกผิดพลาด ทอร์มิเนลบวก |
ระเบิดการระวังการไฟฟ้าเกินแรง |
|
10 |
ALM- |
สัญญาณออกผิดพลาด ทิมินัลลบ |
|
|
11 |
RDY+ |
สัญญาณออกพร้อม สิทธิบวก |
แสดงว่าคนขับพร้อมทํางาน |
|
12 |
RDY |
สัญญาณออกพร้อม สิ้นลบ |
|
|
13, 14, 15 |
NC |
|
ไม่ใช้ |
|
มอเตอร์ ด้านพลังงาน |
1,2 |
L,N |
การให้พลังงาน |
110v ~ 220v |
3 |
PE |
สายพื้นดิน |
ดิน (ภายในกระเป๋าขับเคลื่อน) |
|
4 |
U |
สายมอเตอร์ |
|
|
5 |
V |
|||
6 |
W |
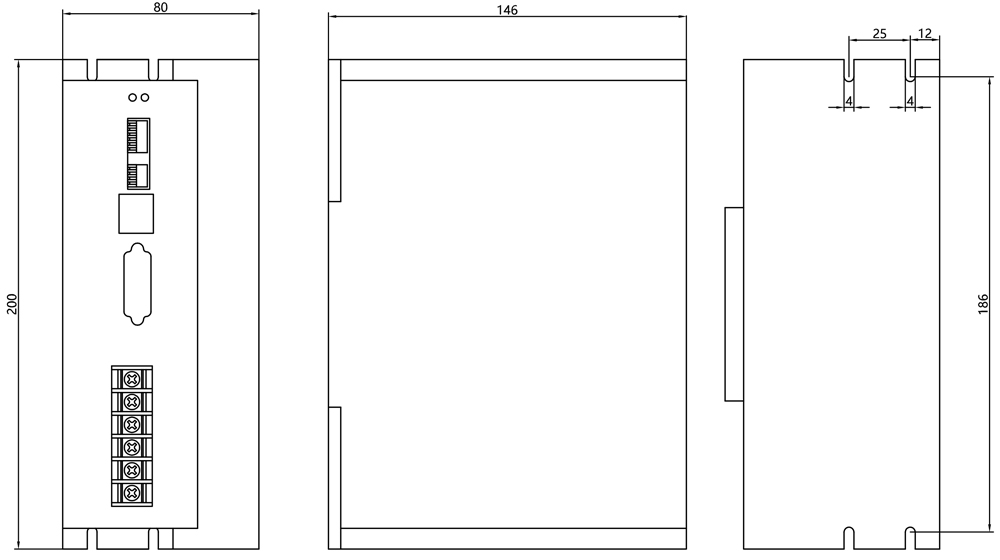
5.มิติทั่วไป
6.บริการลูกค้า
เราให้บริการตัวเลือกในการปรับแต่งหลากหลายในด้านการออกแบบ เช่น ประเภทแกนขับออก ตัวเชื่อมต่อ เบรค เอนコーダ และเกียร์ เป็นต้น ผู้ใช้สามารถเลือกได้อย่างยืดหยุ่นตามความต้องการจริง นอกจากนี้ยังสามารถออกแบบและผลิตตามคำขอพิเศษเฉพาะได้อีกด้วย
7.ตัวเลือก
สายไฟ |
แหวนยึด |
ด้ามจับ |
สกรู |
|
|
|
|
ตัวเข้ารหัส |
เบรก |
เกียร์บ็อกซ์ |
และอื่นๆ อีกมากมาย |
|
|
|
+ |
8.ใบรับรอง
เราได้ผ่านระบบการรับรองคุณภาพ ISO-9001 และได้รับสิทธิบัตรการใช้งานจำนวนหนึ่ง ผลิตภัณฑ์ของเราได้รับการรับรองระดับนานาชาติ เช่น CE และ ROHS

9.รีวิว

ลิขสิทธิ์ © 2026 บริษัทฉางโจวจินซานซือเม่ย์จีอีเล็คโทรนิคส์ จำกัด ทั้งหมดสงวนสิทธิ์ - นโยบายความเป็นส่วนตัว