

Ana Sayfa > Ürünler > Kapalı Döngülü Adım Motorları Ve Sürücüleri > Kapalı döngülü adım sürücüsü

CL57R, Modbus RTU protokolünü destekleyen RS485 Modbus tabanlı kapalı devre step motor sürücü ürünüdür. Bu ürün tek eksenli bir kontrolör fonksiyonunu entegre eder ve kontrol için standart Modbus RTU veri yolu iletişim protokolünü kullanır. Maksimum 32 eksen monte edebilir ve çok eksenli veri yolu senkron kontrolünü gerçekleştirebilir. Sürücüde konum kontrolü, hız kontrolü, 16 segmentli dahili konum ve 16 segmentli dahili hız kontrolü, sıfır dönüş desteği, mutlak/göreceli konumlandırma, JOG ve diğer fonksiyonlar bulunur ve doğrudan bir dokunmatik ekran veya RS485 arayüzlü bir kontrolör kullanılarak kontrol edilebilir.
1. Özellikleri
● RS485 bus üzerinde standart Modbus RTU protokolünü destekler;
● Adım kaybı yok, doğru konumlandırma;
● Akım boyutu yük koşullarına göre akıllıca ayarlanır, çeşitli mekanik yük durumlarına uyum sağlar;
● Daha pürüzsüz işlem için yerleşik hızlandırma, yavaşlama ve pürüzlendirme filtre kontrolü;
● Kullanıcı tanımlı segmentler;
● Konum, hız, sıfırlama dönüşü, JOG, çok aşamalı konum, çok aşamalı hız ve diğer modları destekler;
● 7 giriş portu, 3 çıkış port fonksiyonları tümü programlanabilir ve yapılandırılabilir;
● Gerilim aralığı : DC+24V~48V;
● Aşırı akım, aşırı gerilim, konum toleransı ve diğer koruma özelliklerine sahiptir;
2.Tipik Uygulama
Çeşitli küçük ve orta ölçekli otomasyon ekipmanları ve aletleri için uygun, örneğin endüstriyel robotlar, tekstil makineleri, özel endüstriyel dikiş makineleri, kablo soyguç makineleri, işaretleyici makineler, kesim makineleri, lazer fototipografi, plotters, CNC makine araçları, oyuk makineler, otomatik montaj ekipmanları vb. Kullanıcıların düşük gürültülü ve yüksek hızlı cihazlarda beklediği uygulama etkisi özellikle iyi durumdadır.
3.Elektrik göstergeler
Güç Kaynağı |
DC24~48V, Önerilen güç kaynağı DC36V |
Çıkış Akımı |
Tepe 6.0A (yük ile akım değişir) |
DI giriş akımı |
10~50mA |
DI giriş voltajı |
+24VDC |
İletişim türü |
RS485 |
Maksimum iletişim hızı |
115200bps |
4.Çevre Parametresi
Soğutma Yöntemi |
Doğal soğutma veya dış radyatör |
|
Kullanım ortamı |
Fırsatları kullanın. |
Toz, yağ ve koroziv gazlardan kaçınmaya çalışın. |
Sıcaklık |
0~40℃ |
|
Nem |
40~90% RH |
|
Titreme |
5.9m/s2Max |
|
Depolama Sıcaklığı |
-20℃~80℃ |
|
5.Güç giriş portu
Terminal numarası |
Sembolik |
Ad |
Resimlemek |
1 |
+Vdc |
DC güç kaynağı pozitif terminal |
DC + 24V ~ 48V Önerilen DC + 36V güç kaynağı |
2 |
GND |
DC güç zemini |
6.Motor portu
Pin |
Sembolik |
Açıklama |
1 |
A+ |
Bir faz motor sargısı + |
2 |
- Hayır. |
Bir faz motor sargısı- |
3 |
B+ |
B fazlı motor sargısı + |
4 |
B- |
B fazlı motor sargısı - |
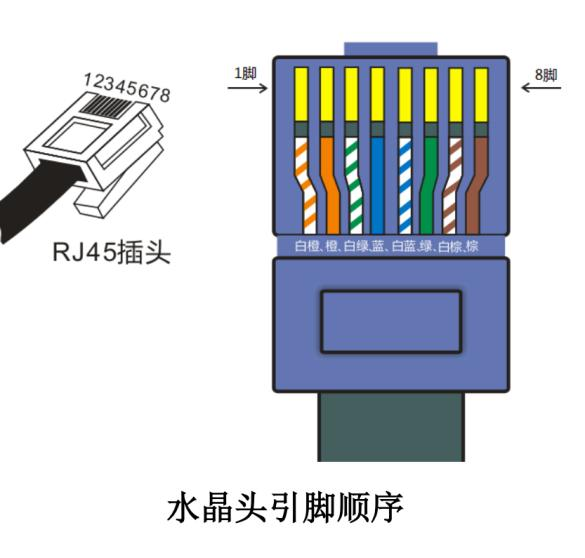
7.RS485 haberleşme portu
Pin |
Sinyal tanımı |
Ağ kablosu rengi |
1 |
RS485+ |
beyaz ve turuncu |
2 |
RS485- |
sıkmak |
3 |
NC |
beyaz ve yeşil |
4 |
NC |
mavi |
5 |
GND |
beyaz ve mavi |
6 |
GND |
yeşil |
7 |
NC |
beyaz ve kahverengi |
8 |
NC |
kahverengi |
8.Kodlayıcı portu
Pin |
Tanımlama |
Resimlemek |
1 |
Kalkan |
Kodlayıcı kalkanı |
2 |
NC |
RS485- |
3 |
NC |
|
4 |
NC |
|
5 |
EVCC |
Enkoder güç kaynağı pozitif terminali |
6 |
EGMND |
Kodlayıcı güç kaynağı negatif terminali |
7 |
NC |
|
8 |
NC |
|
9 |
Eb+ |
|
10 |
EB- |
|
11 |
EA+ |
|
12 |
EA- |
|
9.DI/DO bağlantı noktası
Terminal numarası |
Sembol tanımı |
Resimlemek |
1 |
DI0 |
Tek ucuz giriş portu: geçerli çalışma gerilimi 24V |
2 |
DI1 |
|
3 |
DI2 |
|
4 |
DI3 |
|
5 |
DI4 |
|
6 |
DI5 |
|
7 |
DI6 |
|
8 |
DICOM |
Giriş port ortak portu: ortak anod ve ortak katot bağlantı yöntemiyle uyumlu |
9 |
Yap0 |
Tek uçlu çıkış portu |
10 |
Yap1 |
|
11 |
YAP2 |
|
12 |
DOKOM |
Çıkış port ortak portu: güç kaynağı negatif kutbuna |
10.Durum göstergesi
PWR: Güç Göstergesi. Güç açıkken, yeşil gösterge ışığı her zaman açıktır.
ALM: Hata göstergesi. Kırmızı ışık 3 saniye içinde bir kez yanıp söner, aşırı akım veya faz arası kısa devre hatası; Kırmızı ışık 3 saniye içinde ardışık olarak iki kez yanıp söner, aşırı gerilim hatası; Kırmızı ışık 3 saniye içinde ardışık olarak yedi kez yanıp söner, konum hatası toleransı aşım alarmıdır.
11.DIP anahtar ayarı
CL57R, sürücü istasyon numarasını ayarlamak için 5 haneli bir DIP anahtarı ve iletişim baud oranını ayarlamak için 2 haneli bir DIP anahtarı kullanır.
SW1~SW5: sürücü istasyon numarası ayarı. SW6~SW7: sürücü iletişim baud oranı. Kayıt istasyon numarası ve iletişim baud oranı değiştirildikten sonra etkin olması için yeniden güçlandırılmesi gerekmektedir.
Kayıt istasyon numarası |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
Varsayılan |
ON |
ON |
ON |
ON |
ON |
1 |
OFF |
ON |
ON |
ON |
ON |
2 |
ON |
OFF |
ON |
ON |
ON |
3 |
OFF |
OFF |
ON |
ON |
ON |
4 |
ON |
ON |
OFF |
ON |
ON |
5 |
OFF |
ON |
OFF |
ON |
ON |
6 |
ON |
OFF |
OFF |
ON |
ON |
7 |
OFF |
OFF |
OFF |
ON |
ON |
8 |
ON |
ON |
ON |
OFF |
ON |
9 |
OFF |
ON |
ON |
OFF |
ON |
10 |
ON |
OFF |
ON |
OFF |
ON |
11 |
OFF |
OFF |
ON |
OFF |
ON |
12 |
ON |
ON |
OFF |
OFF |
ON |
13 |
OFF |
ON |
OFF |
OFF |
ON |
14 |
ON |
OFF |
OFF |
OFF |
ON |
15 |
OFF |
OFF |
OFF |
OFF |
ON |
16 |
ON |
ON |
ON |
ON |
OFF |
17 |
OFF |
ON |
ON |
ON |
OFF |
18 |
ON |
OFF |
ON |
ON |
OFF |
19 |
OFF |
OFF |
ON |
ON |
OFF |
20 |
ON |
ON |
OFF |
ON |
OFF |
21 |
OFF |
ON |
OFF |
ON |
OFF |
22 |
ON |
OFF |
OFF |
ON |
OFF |
23 |
OFF |
OFF |
OFF |
ON |
OFF |
24 |
ON |
ON |
ON |
OFF |
OFF |
25 |
OFF |
ON |
ON |
OFF |
OFF |
26 |
ON |
OFF |
ON |
OFF |
OFF |
27 |
OFF |
OFF |
ON |
OFF |
OFF |
28 |
ON |
ON |
OFF |
OFF |
OFF |
29 |
OFF |
ON |
OFF |
OFF |
OFF |
30 |
ON |
OFF |
OFF |
OFF |
OFF |
31 |
OFF |
OFF |
OFF |
OFF |
OFF |
Not: Varsayılan dosyada slave istasyon numarasını ayarlarken, slave istasyon numarasını, özel sürücü slave istasyonunu numara kaydından (0x0020) 1 ile 31 arasında ayarlayarak tanımlayabilirsiniz.
İletişim baud hızı |
SW6 |
SW7 |
9600 |
ON |
ON |
19200 |
OFF |
ON |
38400 |
ON |
OFF |
115200 |
OFF |
OFF |
Not: İletişim baud oranı 9600bps olarak ayarlandığında, seri port veri formatı 8 veri biti, eşitsizlik yok ve 1 durak biti olarak sabitlenir. Diğer üç baud oranlarından biri olarak ayarlandığında, seri port veri formatı seri port veri formatı kaydı (0x0021) tarafından belirlenir.
SW8: RS485 terminal direnci. Veri yolunun sonundaki sürücünün bu DIP anahtarını AÇIK konuma getirmesi ve diğer sürücüleri KAPALI konuma getirmesi gerekir.
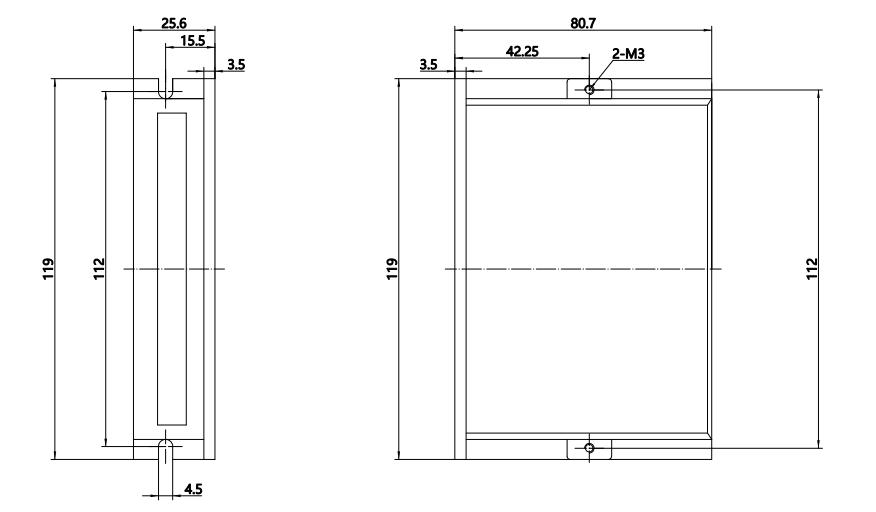
12. Genel Boyutlar (birim=mm)
13. Özel Hizmet
Tasarımda çeşitli özelleştirme seçenekleri sunuyoruz, örneğin çıkış eksen türü, bağlayıcılar, frenler, kodleyiciler ve vites kutuları vb. Kullanıcılar gerçek gereksinimlere göre esnek bir şekilde seçebilir. Ayrıca özel taleplerle tasarlanabilir ve üretilir.
14.Seçenekler
Kablolar |
Flanş |
Çakıl |
Vurulmuş📌 |
|
|
|
|
Kodlayıcı |
Fren |
Şanzıman |
Ve Daha Fazlası |
|
|
|
+ |
15.Sertifika
ISO-9001 kalite sertifikasyon sistemini geçtik ve bir dizi uygulama patenti elde ettik. Ürünlerimiz CE ve ROHS gibi uluslararası sertifikalara sahiptir.

16.İnceleme

Telif hakkı © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Tüm hakları saklıdır. - Gizlilik Politikası










