

Startseite > Produkte > Geschlossene Schleife Schrittmotoren Und Treiber > Schaltkreislauf-Schrittfahrzeug

Unser 3HSS2260 ist ein hybrider Hochleistungs-Schrittmotor-Servoantrieb. Er passt zum dreiphasigen Schrittmotor NEMA 34 und NEMA 42. Im Vergleich zum herkömmlichen Schrittmotortreiber mit offenem Regelkreis kann dieser Schrittmotor-Servoantrieb das Problem des Schrittverlusts beim Schrittmotor vollständig vermeiden. Der Drehmomentabfall bei hoher Geschwindigkeit ist extrem geringer als beim Schrittmotortreiber mit offenem Regelkreis, was die Leistung und das Drehmoment des Hochgeschwindigkeitsmotors erheblich verbessert. Der Treiberstrom kann automatisch basierend auf der Last gesteuert werden, was den Temperaturanstieg des Motors effektiv eindämmt und die Lebensdauer des Motors verlängert. Eingebaute Positions- und Alarmsignalausgabe sind praktisch für den Hostcomputer, um den Motorbetriebszustand zu überwachen und zu steuern. Die Funktion des Überpositionsfehleralarms gewährleistet einen sicheren Betrieb der Ausrüstung. Es ist der ideale Ersatz und das ideale Upgrade für einen herkömmlichen Treiber mit offenem Regelkreis und verfügt außerdem über Teilfunktionen eines AC-Servosystems. Der Preis beträgt nur die Hälfte des AC-Systems.
1.Eigenschaften
● 32-Bit-DSP und Vektor-Regeltechnik
● Hohe Positionsgenauigkeit ohne Schrittverlust
● Verbesserung des Motorausgangsdrehmoments und der Arbeitsgeschwindigkeit
● Technologie zur variablen Stromregelung, begrenzt den Temperaturanstieg des Motors
● Anpassungsfähig an verschiedene mechanische Belastungsbedingungen (einschließlich der Schrägmaschinen mit geringer Steifigkeit), keine
müssen Sie den Verstärkungsparameter anpassen
● Sanfte und zuverlässige Bewegung, geringe Vibration, große Verbesserung bei Beschleunigung und Verzögerung
● Die Fähigkeit der statischen Nullgeschwindigkeit ohne Vibration
● Anpassung an den 3-phasigen Hybrid-Servomotor NEMA34 und NEMA 42
● Maximale Schrittimpulsfrequenz 200 KHZ
● Mikro-Schritt 400-60000 Puls/Uhr
● Spannungsbereich AC150-240V
● Überstrom-, Überspannungs- und Überpositionsschutz
● Sechs digitale Schlauchanzeigen, die Parameter leicht einstellen und den Motorlaufzustand überwachen können
2.Elektrische Parameter
Eingangsspannung |
AC150~240V (normalerweise 220VAC) |
Stromausgang |
Spitze 6,0 A (Strom variabel je nach Belastung) |
Logischer Stromeingang |
7 bis 20 mA |
Frequenz |
0~200KHz |
Geeigneter Motor |
3-phasiger Hybrid-Servomotor der Baureihen nema 34 und nema 42 |
Auflösung des Encoder |
1000 |
Isolationswiderstand |
≥ 500 MΩ |
3.Umgebungsparameter
Kühlmethode |
Natürliche oder zwangsluftgetriebene Kühlung |
Arbeitsumgebung |
Vermeiden Sie Staub, Ölnebel und korrosive Gase |
Betriebstemperatur |
0~50℃ |
Feuchtigkeit |
40 bis 90% RH |
Vibration |
5,9 m/s2 Max |
Lagertemperatur |
-20℃~65℃ |
3.Stromschnittstellenanschlüsse1
Hafen |
Symbol |
Definition |
Bemerkung |
1 |
L |
Motorstromanschluss an 220AC |
|
2 |
N |
|
|
3 |
NC |
Nicht verbunden |
|
4 |
BR |
Bremswiderstand |
Außenbremswiderstand zwischen Br und P+ |
5 |
P+ |
Gleichspannung des Gleichspannungsbuses |
4.Stromschnittstellenanschlüsse2
Hafen |
Symbol |
Definition |
NEMA34 |
NEMA42 |
1 |
U |
Motoranschluss Port U |
ROT |
SCHWARZ |
2 |
V |
Motoranschluss Port V |
SCHWARZ |
Braun |
3 |
W |
Motoranschluss Port W |
Blau |
Blau |
4 |
PE |
Erde |
gelb |
gelb |
5 |
L |
Stromversorgung des Controllers: Anschluss an 220 VAC |
Bereich AC150-220V |
|
6 |
N |
|||
5.Steuersignal-Schnittstellenanschlüsse
Hafen |
Symbol |
Definition |
Bemerkung |
3 |
PUL+ |
Impulssignaleingang + |
|
4 |
PUL- |
Impulssignaleingang - |
|
5 |
DIR+ |
Richtung Signaleingang + |
|
6 |
- Ich weiß. |
Richtungssignaleingang - |
|
7 |
ALM+ |
Alarmsignalausgang + |
|
8 |
- Ich weiß nicht. |
Alarmsignalausgang - |
|
9 |
PEND+ |
Positionssignalausgang + |
|
10 |
- Das ist nicht wahr. |
Positionssignalausgang - |
|
11 |
ENA+ |
Signaleingang aktivieren + |
|
12 |
- Ich weiß. |
Signaleingang aktivieren - |
|
23 |
OA+ |
Encoder A Ausgang |
Encoder A,B,Z Signal differenzialantrieb (26LS31) ausgang, nicht isolierter Ausgang. Wenn der Motor nur mit A,B zwei kanal-Encoder, dann ignorieren Sie Z kanal. |
24 |
OA- |
||
25 |
OB+ |
Encoder B Ausgang |
|
26 |
OB- |
||
27 |
OZ+ |
Encoder Z-Ausgang |
|
28 |
OZ- |
||
29 |
CZ |
Encoder Z Open-Collector-Ausgang |
|
30 |
GND |
Erde |
|
6.Encoder-Signaleingangsschnittstellenanschlüsse
Hafen |
Symbol |
Definition |
Bemerkung |
1 |
EA+ |
Encoder A+ Eingang |
Wenn der Motor nur mit A,B Zweikanal-Encoder, dann ignorieren Sie Z kanal. |
11 |
EA- |
Encoder A - Eingang |
|
2 |
EB+ |
Encoder B+ Eingang |
|
12 |
EB- |
Encoder B - Eingang |
|
7 |
EZ+ |
Encoder Z+ Eingang |
|
8 |
EZ- |
Encoder Z-Eingang |
|
13 |
VCC |
+5V |
|
3 |
GND |
Erde |
7.RS232-Kommunikationsschnittstellen
Hafen |
Symbol |
Definition |
1 |
NC |
Nicht verbunden |
2 |
+5V |
Für externe HISU |
3 |
TXD |
RS232-Übertragungsanschluss |
4 |
GND |
Erde |
5 |
RXD |
RS232-Empfangsport |
6 |
NC |
Nicht verbunden |
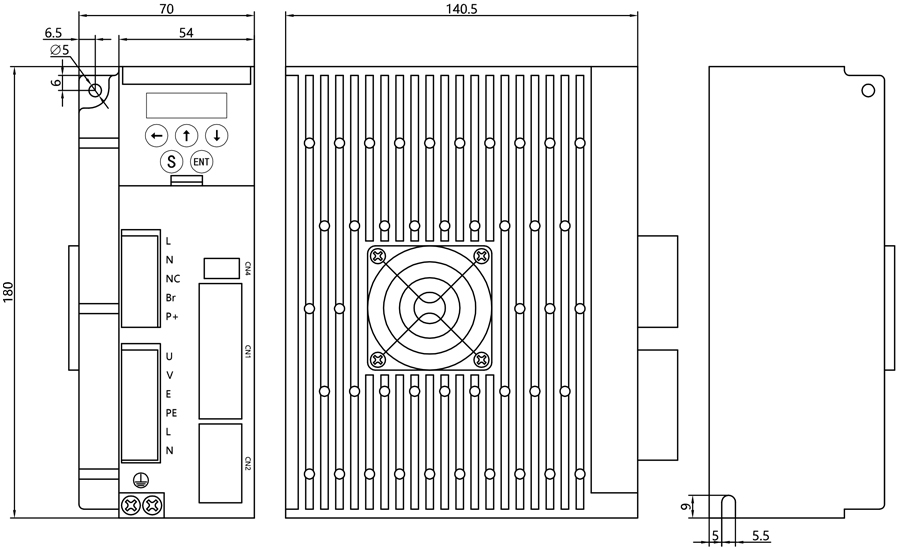
8. Gesamtabmessungen (Einheit = mm)
9.Anpassungsdienst
Wir bieten eine Vielzahl von Anpassungsoptionen in der Gestaltung an, wie z. B. Ausgangswelle-Typ, Steckverbinder, Bremsen, Encoder und Getriebe usw. Nutzer können je nach tatsächlichem Bedarf flexibel auswählen. Auch besondere Anpassungsanforderungen können entworfen und hergestellt werden.
10.Optionen
Drähte |
Flansch |
Welle |
Schraube |
|
|
|
|
Encoder |
Bremse |
Getriebe |
Und mehr |
|
|
|
+ |
11.Zertifikat
Wir haben das ISO-9001 Qualitätszertifizierungssystem bestanden und numerous Anwendungspatente erhalten. Unsere Produkte verfügen über internationale Zertifikate wie CE und ROHS.

12.Rezension

Urheberrecht © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Alle Rechte vorbehalten. - Datenschutzrichtlinie










