

Startseite > Produkte > Geschlossene Schleife Schrittmotoren Und Treiber > Schaltkreislauf-Schrittfahrzeug

Unser CL57R ist ein Schrittmotorantrieb mit geschlossenem Regelkreis, der auf dem RS485-Modbus basiert und das Modbus-RTU-Protokoll unterstützt. Dieses Produkt integriert eine Einzelachsen-Controller-Funktion und verwendet zur Steuerung das standardmäßige Modbus-RTU-Buskommunikationsprotokoll. Es kann maximal 32 Achsen montieren und eine mehrachsige Bussynchronsteuerung realisieren. Der Treiber verfügt über Positionssteuerung, Geschwindigkeitssteuerung, 16-Segment-interne Positions- und 16-Segment-interne Geschwindigkeitssteuerung, unterstützt Nullrückführung, absolute/relative Positionierung, JOG und andere Funktionen und kann direkt über einen Touchscreen oder einen Controller mit einer RS485-Schnittstelle gesteuert werden.
1.Eigenschaften
● Unterstützt das Standard-Modbus RTU-Protokoll über den RS485-Bus;
● Kein Schrittverlust, präzise Positionierung;
● Die Stromgröße wird intelligent an die Last angepasst, um sich an verschiedene mechanische Lastbedingungen anzupassen;
● Eingebaute Beschleunigungs-, Verzögerungs- und Glättungsfiltersteuerung für einen reibungsloseren Betrieb;
● Benutzerdefinierte Segmente;
● Unterstützt Position, Geschwindigkeit, Nullrückkehr, JOG, mehrstufige Position, mehrstufige Geschwindigkeit und andere Modi;
● 7 Eingangsports, 3 Ausgangsportfunktionen, alle programmierbar und konfigurierbar;
● Spannungsbereich: DC+24V~48V;
● Mit Überstrom-, Überspannungs-, Positionsabweichung und anderen Schutzmaßnahmen;
2.Typische Anwendung
Geeignet für verschiedene Klein- und Mittelautomatisierungsgeräte und -instrumente, wie Industrieroboter, Textilmaschinen, spezielle industrielle Nähmaschinen, Kabelschlitzmaschinen, Markierungsmaschinen, Schneidemaschinen, Laser-Setzmaschinen, Plotter, CNC-Fräser, Gravurmaschinen, automatische Montagieranlagen usw. Der Anwendungseffekt ist besonders gut in Geräten, bei denen Benutzer niedrige Geräuschemissionen und hohe Geschwindigkeit erwarten.
3.Elektrische Anzeigen
Netzteil |
DC24~48V, empfohlene Stromversorgung DC36V |
Ausgangsstrom |
Spitze 6,0 A (Strom ändert sich mit der Last) |
DI-Eingangsstrom |
10 bis 50 mA |
DI-Eingangsspannung |
+24 V DC |
Art der Kommunikation |
Die Nummer des Zertifikats ist: |
Maximale Kommunikationsrate |
115200 Bps |
4.Umgebungsparameter
Kühlmethode |
Natürliche Kühlung oder Außengelder |
|
Verwendungsumgebung |
Nutzen Sie Gelegenheiten |
Versuchen Sie, Staub, Öl und ätzende Gase zu vermeiden |
Temperatur |
0~40℃ |
|
Feuchtigkeit |
40 bis 90% RH |
|
Vibration |
5,9 m/s2 Max |
|
Lagertemperatur |
-20℃~80℃ |
|
5.Stromeingangsanschluss
Nummer des Terminals |
Symbol |
Name |
Veranschaulichen |
1 |
+Vdc |
Gleichstromversorgung |
Gleichspannung + 24 V bis 48 V Empfohlene DC+36V-Stromversorgung |
2 |
GND |
Gleichstrom-Erdnetz |
6.Motoranschluss
Pin |
Symbol |
Beschreibung |
1 |
A+ |
Eine Phase der Motorwicklung + |
2 |
- Ich weiß. |
Eine Phasenmotorwicklung |
3 |
B+ |
B-Phase Motorwicklung + |
4 |
- Ich weiß. |
B-Phase-Motorwicklung - |
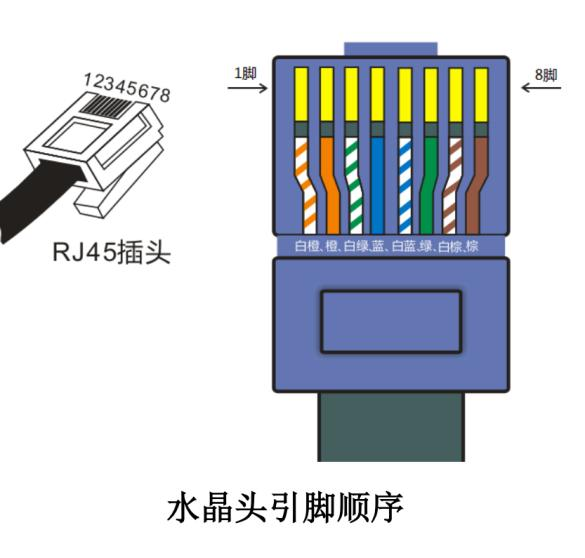
7.RS485-Kommunikationsanschluss
Pin |
Signaldefinition |
Netzwerkkabelfarbe |
1 |
RS485+ |
weiß und orange |
2 |
RS485- |
wrang |
3 |
NC |
weiß und grün |
4 |
NC |
blau |
5 |
GND |
weiß und blau |
6 |
GND |
grün |
7 |
NC |
weiß und braun |
8 |
NC |
braun |
8.Encoder-Anschluss
Pin |
Definition |
Veranschaulichen |
1 |
Shield |
Encoder-Abschirmung |
2 |
NC |
RS485- |
3 |
NC |
|
4 |
NC |
|
5 |
EVCC |
Pluspol der Encoder-Stromversorgung |
6 |
EGND |
Minuspol der Encoder-Stromversorgung |
7 |
NC |
|
8 |
NC |
|
9 |
EB+ |
|
10 |
EB- |
|
11 |
EA+ |
|
12 |
EA- |
|
9.DI/DO-Anschluss
Nummer des Terminals |
Symboldefinition |
Veranschaulichen |
1 |
DI0 |
Einpoliger Eingang: gültige Arbeitsspannung 24V |
2 |
DI1 |
|
3 |
DI2 |
|
4 |
DI3 |
|
5 |
DI4 |
|
6 |
DI5 |
|
7 |
DI6 |
|
8 |
DICOM |
Gemeinsamer Eingang: kompatibel mit Anodenschluß- und Kathodenschluß-Anschlußmethode |
9 |
DO0 |
Single-Ended-Ausgangsport |
10 |
DO1 |
|
11 |
DO2 |
|
12 |
DOCOM |
Ausgangs-Port gemeinsamer Port: Negativpol der Spannungsquelle |
10.Statusanzeige
PWR: Betriebsanzeige. Wenn der Strom eingeschaltet ist, leuchtet die grüne Kontrollleuchte immer.
ALM: Fehleranzeige. Das rote Licht blinkt einmal innerhalb von 3 Sekunden, Überstrom- oder Phasen-zu-Phasen-Kurzschlussfehler; Das rote Licht blinkt 2 Mal hintereinander innerhalb von 3 Sekunden, Überspannungsfehler; Das rote Licht blinkt 7 Mal hintereinander innerhalb von 3 Sekunden, die Positionsabweichung überschreitet die Toleranzwarnung.
11.DIP-Schaltereinstellung
CL57R verwendet einen 5-stelligen DIP-Schalter, um die Nummer der Fahrerstation einzustellen, und einen 2-stelligen DIP-Schalter, um die Kommunikationsbaudrate einzustellen.
SW1~SW5: Einstellung der Fahrerstationsnummer. SW6~SW7: Baudrate der Fahrerkommunikation. Die Slave-Stationnummer und die Kommunikationsbaudrate müssen nach der Änderung erneut eingeschaltet werden, um wirksam zu werden.
Slave-Stationnummer |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
Standard |
Auf |
Auf |
Auf |
Auf |
Auf |
1 |
Aus |
Auf |
Auf |
Auf |
Auf |
2 |
Auf |
Aus |
Auf |
Auf |
Auf |
3 |
Aus |
Aus |
Auf |
Auf |
Auf |
4 |
Auf |
Auf |
Aus |
Auf |
Auf |
5 |
Aus |
Auf |
Aus |
Auf |
Auf |
6 |
Auf |
Aus |
Aus |
Auf |
Auf |
7 |
Aus |
Aus |
Aus |
Auf |
Auf |
8 |
Auf |
Auf |
Auf |
Aus |
Auf |
9 |
Aus |
Auf |
Auf |
Aus |
Auf |
10 |
Auf |
Aus |
Auf |
Aus |
Auf |
11 |
Aus |
Aus |
Auf |
Aus |
Auf |
12 |
Auf |
Auf |
Aus |
Aus |
Auf |
13 |
Aus |
Auf |
Aus |
Aus |
Auf |
14 |
Auf |
Aus |
Aus |
Aus |
Auf |
15 |
Aus |
Aus |
Aus |
Aus |
Auf |
16 |
Auf |
Auf |
Auf |
Auf |
Aus |
17 |
Aus |
Auf |
Auf |
Auf |
Aus |
18 |
Auf |
Aus |
Auf |
Auf |
Aus |
19 |
Aus |
Aus |
Auf |
Auf |
Aus |
20 |
Auf |
Auf |
Aus |
Auf |
Aus |
21 |
Aus |
Auf |
Aus |
Auf |
Aus |
22 |
Auf |
Aus |
Aus |
Auf |
Aus |
23 |
Aus |
Aus |
Aus |
Auf |
Aus |
24 |
Auf |
Auf |
Auf |
Aus |
Aus |
25 |
Aus |
Auf |
Auf |
Aus |
Aus |
26 |
Auf |
Aus |
Auf |
Aus |
Aus |
27 |
Aus |
Aus |
Auf |
Aus |
Aus |
28 |
Auf |
Auf |
Aus |
Aus |
Aus |
29 |
Aus |
Auf |
Aus |
Aus |
Aus |
30 |
Auf |
Aus |
Aus |
Aus |
Aus |
31 |
Aus |
Aus |
Aus |
Aus |
Aus |
Hinweis: Wenn Sie die Slave-Stationsnummer in der Standarddatei festlegen, können Sie die Slave-Stationsnummer definieren, indem Sie im benutzerdefinierten Treiber des Slave-Stationsregisters (0x0020) einen Wert im Bereich von 1 bis 31 festlegen.
Kommunikations-Baudrate |
SW6 |
SW7 |
9600 |
Auf |
Auf |
19200 |
Aus |
Auf |
38400 |
Auf |
Aus |
115200 |
Aus |
Aus |
Hinweis: Wenn die Kommunikationsbaudrate auf 9600bp s eingestellt ist, ist das Datenformat des seriellen Ports auf 8 Datenbits, keine Parität und 1 Stoppbit festgelegt. Bei den anderen drei Baudraten wird das Datenformat des seriellen Ports durch das Register für das Datenformat des seriellen Ports (0x0021) bestimmt.
SW8: RS485-Abschlusswiderstand. Der Treiber am Ende des Busses muss diesen DIP-Schalter auf ON und die anderen Treiber auf OFF stellen.
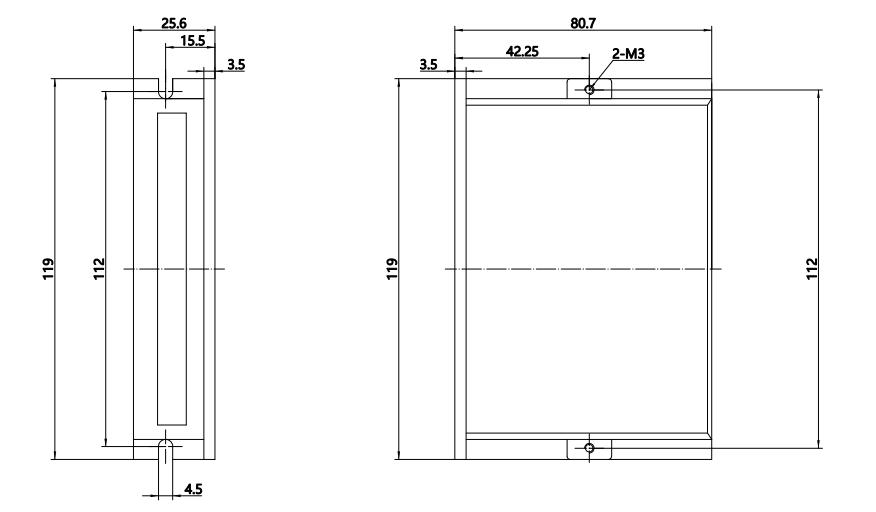
12. Gesamtabmessungen (Einheit = mm)
13.Anpassungsdienstleistungen
Wir bieten eine Vielzahl von Anpassungsoptionen in der Gestaltung an, wie z. B. Ausgangswelle-Typ, Steckverbinder, Bremsen, Encoder und Getriebe usw. Nutzer können je nach tatsächlichem Bedarf flexibel auswählen. Auch besondere Anpassungsanforderungen können entworfen und hergestellt werden.
14.Optionen
Drähte |
Flansch |
Welle |
Schraube |
|
|
|
|
Encoder |
Bremse |
Getriebe |
Und mehr |
|
|
|
+ |
15.Zertifikat
Wir haben das ISO-9001 Qualitätszertifizierungssystem bestanden und numerous Anwendungspatente erhalten. Unsere Produkte verfügen über internationale Zertifikate wie CE und ROHS.

16.Bewertung

Urheberrecht © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Alle Rechte vorbehalten. - Datenschutzrichtlinie










