

Página de Inicio > Productos > motores Servo Paso a Paso Integrados > RS485 Servomotores paso a paso integrados

Nuestro JSS57R es un servomotor híbrido integrado basado en el bus RS485 que admite el protocolo Modbus RTU. Este producto integra el servomotor híbrido y el conductor, y utiliza el protocolo de comunicación de bus Modbus RTU estándar para el control. En comparación con la combinación tradicional de motor paso a paso y motor paso a paso, el rendimiento de los costes es mayor. Este producto servo híbrido integrado integra las ventajas del control de comunicación del autobús, cableado simple, sin pasos perdidos, bajo aumento de temperatura, bajo ruido, alta velocidad, alto par y bajo costo. Es un producto de control de movimiento muy rentable.
1. Características
2.Especificaciones eléctricas
Modelo NO. |
Ángulo de paso |
Largo del motor |
Corriente /Phase |
Resistencia /Phase |
Inductancia /Phase |
Torque de retención |
(°) |
(L) mm |
A |
ω |
mH |
Nuevo Méjico |
|
El número de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de la prueba de |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
El número de la prueba de la prueba es el siguiente: |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
El número de la prueba de la prueba es el siguiente: |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Indictores eléctricos
Fuente de alimentación |
DC24~48V, fuente de alimentación recomendada DC36V |
Corriente de salida |
Pico 6.0A (corriente varía con la carga) |
Corriente de entrada lógica |
7~16mA, 10mA recomendado |
Tipo de comunicación |
Se trata de un sistema de control de velocidad. |
velocidad máxima de comunicación |
115200 bps |
Fuente de alimentación |
DC24~48V, fuente de alimentación recomendada DC36V |
5.Ambiente de uso y parámetros
Método de enfriamiento |
Refrigeración natural o radiador externo |
|
Medio ambiente de uso |
Aprovecha las ocasiones |
Evite el polvo, el aceite y los gases corrosivos tanto como sea posible |
Temperatura |
0~40℃ |
|
Humedad |
40 a 90% de Hg |
|
Vibración |
5,9 m/s2 Máximo |
|
Temperatura de almacenamiento |
-20℃~80℃ |
|
6.Definición de la interfaz
(1)Puerto de entrada de energía
Número de terminal |
El símbolo |
Nombre |
Ilustrar |
1 |
+Vdc |
Terminal positivo de potencia de CC |
Las emisiones de CO2 de los combustibles renovables Fuente de alimentación DC+36V recomendada |
2 |
El GND |
Tierra de energía de corriente continua |
(2) Puerto de señal de control
Número de terminal |
El símbolo |
Nombre |
Ilustrar |
1 |
El CCW+ |
Límites positivos positivos |
Apoyo de +5V~+24V |
2 |
- ¿Qué es eso? |
Límites positivos negativos |
|
3 |
HOME+ |
El origen mecánico es positivo |
|
4 |
- ¿Qué quieres decir? |
Origen mecánico negativo |
|
5 |
CW+ |
Límites negativos positivos |
|
6 |
¿Qué es eso? |
Límites negativos |
|
7 |
PEND+ |
Salida positiva de la señal en posición |
|
8 |
- ¿Qué quieres decir? |
Salida negativa de la señal en posición |
|
9 |
El valor de la ayuda |
Se emite la señal de alarma. |
|
10 |
- ¿ Qué es eso? |
Salida negativa de la señal de alarma |
(3) Puerto de comunicación RS485.
Número de terminal |
El símbolo |
Nombre |
1 |
Se trata de un sistema de seguridad. |
Interfaz de comunicación RS485 |
2 |
RS485- |
|
3 |
Se trata de un sistema de seguridad. |
|
4 |
RS485- |
|
5 |
El GND |
|
(4)Indición del estado
PWR: Indicador de alimentación. Cuando está encendido, la luz indicadora verde está siempre encendida.
ALM: Indicador de fallo. Luz roja parpadea una vez dentro de 3 segundos: sobrecorriente o fallo de cortocircuito de fase a fase; La luz parpadea 2 veces continuamente dentro de 3 segundos: fallo de sobre tensión;
La luz roja parpadea 7 veces continuamente dentro de 3 segundos: la alarma de error de posición está fuera de tolerancia.
7.Configuración del interruptor DIP
JSS57R utiliza un interruptor DIP de 6 bits para establecer el número de estación de transmisión y la velocidad de transmisión de comunicación.
SW1~SW4: Configuración del número de la estación de accionamiento. SW5~SW6: velocidad de comunicación de unidad de baud. Después de que el número de estación esclavo y la velocidad de transmisión de comunicación se modifican, debe encendirse nuevamente para que surta efecto.
Número de esclavo |
El número de la |
El número de personas |
El número de personas |
El número de la |
predeterminado |
On |
On |
On |
On |
1 |
Off |
On |
On |
On |
2 |
On |
Off |
On |
On |
3 |
Off |
Off |
On |
On |
4 |
On |
On |
Off |
On |
5 |
Off |
On |
Off |
On |
6 |
On |
Off |
Off |
On |
7 |
Off |
Off |
Off |
On |
8 |
On |
On |
On |
Off |
9 |
Off |
On |
On |
Off |
10 |
On |
Off |
On |
Off |
11 |
Off |
Off |
On |
Off |
12 |
On |
On |
Off |
Off |
13 |
Off |
On |
Off |
Off |
14 |
On |
Off |
Off |
Off |
15 |
Off |
Off |
Off |
Off |
Nota: La configuración del número de estación de esclavo, cuando está en el archivo predeterminado, puede definir el número de estación de esclavo configurando el registro de número de estación de esclavo de unidad personalizada (0x0020), el rango es de 1 ~ 31.
Tasa de transmisión de datos |
El número de personas |
El número de la |
9600 |
On |
On |
19200 |
Off |
On |
38400 |
On |
Off |
115200 |
Off |
Off |
Nota: Cuando la velocidad de transmisión de comunicación está fijada en 9600bps, el formato de datos serie está fijado en 8 bits de datos, sin paridad y 1 bit de parada. Cuando se establece a otras tres velocidades de baud, el formato de datos del puerto serie se determina por el registro del formato de datos del puerto serie (0x0021).
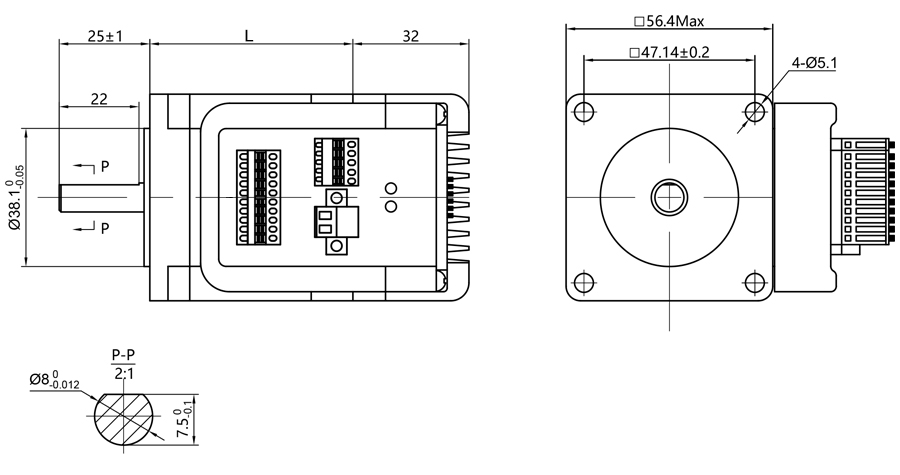
8.Dimensional Overall
9.Certificado
Hemos obtenido la certificación de calidad ISO-9001 y hemos recibido numerosas patentes de aplicación. Nuestros productos tienen certificaciones internacionales como CE y ROHS.

10.Revisión

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Todos los derechos reservados. - Política de privacidad


