Etusivu > Tuotteet > Askelpiirin Moottorit Ja Ajojärjestelmät > Asennus- ja käyttöohjaus

STD3722 on digitaalinen askelmoottori, joka perustuu DSP-ohjaukseen. STD3722:n ohjaamat askelmoottorit voivat toimia huomattavasti vähemmän melua ja värähtelyä käyttäen kuin muut markkinoilla olevat moottorit. Asennus tarkkuus voi olla jopa 60 000 askelta/vallankumous. Tätä askelpyöräistä kuljetinta käytetään laajalti suurissa ja keskisuurissa, korkean resoluution CNC-laitteissa, kuten kaiverruskoneissa, keskisuurissa CNC-työkaluissa, tietokonepohjaisissa koneissa ja pakkauskoneissa.
1.Erityypit
● Kolmivaiheinen digitaalinen askelpyöräohjain, 32-bittinen DSP-teknologia
● Vähä melua, vähäisiä tärinää ja alhaista lämpötilan nousua
● Jännite 110V~220VAC
● 8 asennettavan virran laittaminen, huipputaso 7,0A
● 16 aseman mikrostappisuuntaus, korkein resoluutio 60000 askelta/kierroksessa
● Automaattinen puolivirta, itsetesti, ylipinta, ylipinta, ylipinta suoja
● Sisäinen optinen eristäminen, korkein 200 Kpp:n vastaustaajuus
● Soveltuu 3-vaiheiseen nem42 askelmoottoriin, nem52 askelmoottoriin 1,2 - 7,0A:n välillä
● Kun askelpulssi pysähtyy yli 100 ms:n ajan, kaapelikuranta pienenee automaattisesti puolet asetetusta virrasta, mikä vähentää tehokkaasti moottorin lämpöä
● Signaalijännitys: 5V ~ 24V yhteensopiva
● Työlämpötila: -30 °C ~ 85 °C
2. Mikrosetkinvalinta
Pulssit/REV |
D1 |
D2 |
D3 |
D4 |
400 |
Päällä |
Päällä |
Päällä |
Päällä |
500 |
Päällä |
Päällä |
Päällä |
- Ei, ei, ei. |
600 |
Päällä |
Päällä |
- Ei, ei, ei. |
Päällä |
800 |
Päällä |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
1000 |
Päällä |
- Ei, ei, ei. |
Päällä |
Päällä |
1200 |
Päällä |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
2000 |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
3000 |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
4000 |
- Ei, ei, ei. |
Päällä |
Päällä |
Päällä |
5000 |
- Ei, ei, ei. |
Päällä |
Päällä |
- Ei, ei, ei. |
6000 |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
Päällä |
10000 |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
12000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
Päällä |
20000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
30000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
60000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
3.Nykyinen asetus
Nykyinen |
D1 |
D2 |
D3 |
D4 |
1.2A |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
1.5A |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
2.0A |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
2.3A |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
Päällä |
2.5A |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
3.0A |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
Päällä |
3.2A |
- Ei, ei, ei. |
Päällä |
Päällä |
- Ei, ei, ei. |
3.6A |
- Ei, ei, ei. |
Päällä |
Päällä |
Päällä |
D5: ON, kaksoispulssi: PU on eteenpäin siirtymäpulssisignaali, DR on taaksepäin siirtymäpulssisignaali; OFF, yksittäispulssi: PU on askelpulssisignaali, DR on suunnanhallintasignaali
D6: automaattinen havaintopyssin (PÄÄÄNNÄ ulkomaanpulssin vastaanottamisen yhteydessä, SYSTÄMINEN 30 r/min:n sisäiseen nopeuteen)
4.Signaaliportit (DB15) Kuvaus
Sataman määritelmä |
PIN-numero |
Symboli |
Ominaisuudet |
Huomautus |
RS-232:n käyttö |
1 |
RX |
Tietojen vastaanottaminen |
Liittynyt ohjaamon porttiin TX (toiminta säilytetään) |
2 |
TX |
Lähetä tietoja |
Liittynyt ohjaimen porttiin RX (toiminta säilytetään) |
|
8 |
GND |
Maapintaviiva |
Sähköllä on oltava yhteys ohjaimen kentän maantieteelliseen johtoon (toimintojen säilyttäminen) |
|
|
DB15:n |
1 |
PU+ |
Tulosimpulssisignaalin positiivinen päätelaite |
yhdistää signaalin virtalähde, +5V~+24V voidaan ajaa |
2 |
- Ei, ei, ei, ei. |
DP5=OFF, PU on askelpulssisignaali |
Laskenevä reuna on kelvollinen. Kun pulssi siirtyy korkeasta alhaiseen, moottori ottaa askelen, ja sisäinen nykyrajoittava vastus 220Ω edellyttää: matala taso 0~0,5V, korkea taso 24V tai vähemmän, pulssileveys 2,5μS. |
|
DP5=ON, PU on positiivinen vaihevaiheen pulssisignaali | ||||
3 |
DR+ |
Syöttösuuntaussignaalin positiivinen päätelaite |
yhdistää signaalin virtalähde, + 5V ~ + 24V voidaan ajaa |
|
4 |
DR- |
DP5=OFF, DR on suunnanpulssisignaali |
Käytetään muuttamaan moottorin suuntaa. Vaatimukset: matala taso 0-0,5V, korkea taso 24V tai vähemmän, pulssileveys 2,5μS. |
|
DP5=ON, DR on käänteinen pulssisignaali | ||||
|
5 |
MF+ |
Input-moottorin vapautussignaali (voimaantumissignaali) positiivinen päätelaite |
yhdistää signaalin virtalähde, +5V~+24V voidaan ajaa |
|
|
6 |
MF- |
Moottorin vapautussignaali (käynnistyssignaali) negatiivinen päätelaite |
Kun moottori on sammutettu ja kuljettaja lopettaa toimintansa, moottori on vapaassa tilassa |
|
7 |
NC |
|
ei ole voimassa |
|
8 |
NC |
|
ei ole voimassa |
|
9 |
ALM+ |
Virheen johtamissignaalin positiivinen päätelaite |
ylikuormitus- ja ylikuumenemisharjoitus |
|
10 |
- Ei, ei, ei. |
Virheen johtamissignaalin negatiivinen päätelaite |
|
|
11 |
RDY+ |
Valmis lähtösignaali positiivinen terminaali |
Ilmoita, että kuljettaja on valmis työskentelemään |
|
12 |
- RYK:n kanssa. |
Valmis lähtösignaali negatiivinen päätepiste |
|
|
13, 14, 15 |
NC |
|
ei ole voimassa |
|
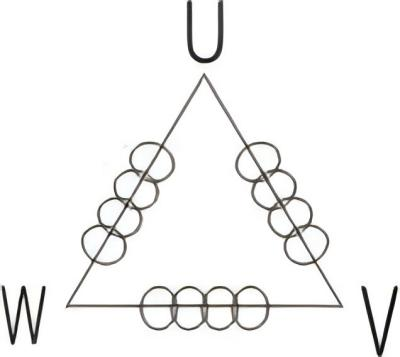
Moottori, virtalähteen puoli |
1,2 |
L,N |
Virtalähde |
110 v ~ 220 v |
3 |
PE |
Maapintaviiva |
Maapallo (sisäasennettu ajokäyttö) |
|
4 |
U |
Moottoritiet |
|
|
5 |
V |
|||
6 |
L |
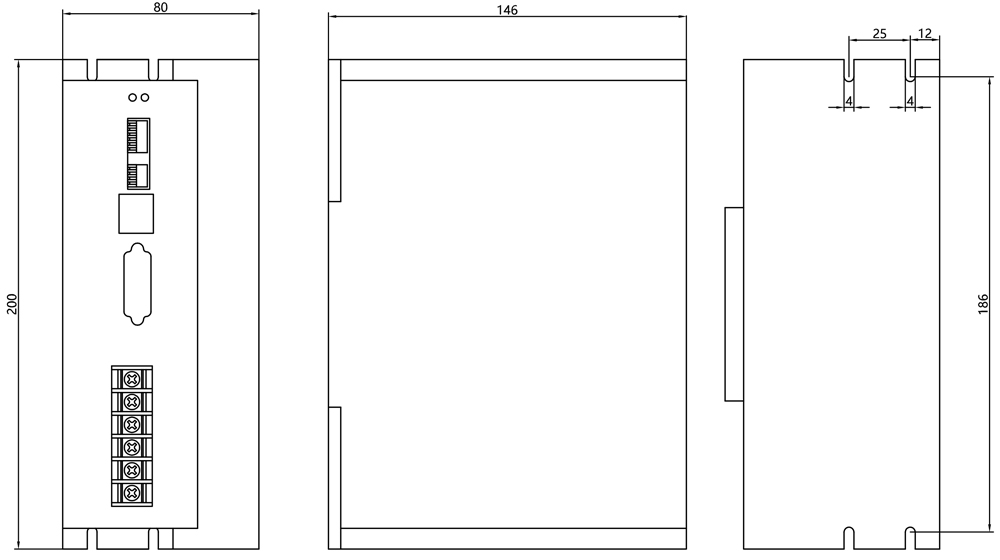
5.Yleiset ulottuvuudet
6.Mukautettu palvelu
Tarjoamme monia mukauttamisvaihtoehtoja suunnitteluissa, kuten lähtöpyöräilyn tyyppi, yhdistimet, jarrut, kodekaat ja värikkäät jne. Käyttäjät voivat valita joustavasti todellisten tarpeiden mukaan. Ne voidaan myös suunnitella ja valmistaa erityisten mukauttamiin pyyntöihin.
7.Vaihtoehdot
Sähköjohtimet |
Flankki |
Kynsijä |
Ruuvi |
|
|
|
|
Enkooderi |
Jarru |
Vaihteisto |
Ja Lisää |
|
|
|
+ |
8.Todistus
Olemme saavuttaneet ISO-9001-laadun todistussuunnitelman ja saamme useita sovelluspateenteja. Tuotteillamme on kansainvälisiä todistuksia, kuten CE ja ROHS.

9.Arvio

Tekijänoikeus © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Kaikki oikeudet pidätetään. - Tietosuojakäytäntö