

Halaman Utama > Produk > Motor dan Driver Stepper Loop Tertutup > Pengemudi stepper loop tertutup

3HSS2260 kami adalah penggerak servo stepper daya tinggi hibrida. Cocok untuk motor stepper tiga fase NEMA 34 dan NEMA 42. Dibandingkan dengan penggerak stepper loop terbuka tradisional, penggerak servo stepper ini dapat sepenuhnya menghindari masalah kehilangan langkah motor stepper, penurunan torsi kecepatan tinggi jauh lebih rendah daripada penggerak stepper loop terbuka, sangat meningkatkan kinerja dan torsi motor kecepatan tinggi. Arus penggerak dapat dikontrol secara otomatis berdasarkan beban, secara efektif menahan kenaikan suhu motor, memperpanjang masa pakai motor. Posisi terpasang dan keluaran sinyal alarm memudahkan komputer host untuk memantau dan mengontrol status pengoperasian motor. Fungsi alarm kesalahan posisi berlebih memastikan peralatan bekerja dengan aman. Ini adalah pengganti dan peningkatan ideal dari penggerak loop terbuka tradisional, dan juga dengan fungsi bagian dari sistem servo AC, harganya hanya setengah dari sistem AC.
1.Fitur
● DSP 32-bit dan teknologi kontrol loop tertutup vektor
● Tanpa kehilangan langkah, akurasi tinggi pada posisi
● Meningkatkan torsi keluaran motor dan kecepatan kerja
● Teknologi kontrol arus variabel, menahan kenaikan suhu motor
● Beradaptasi dengan berbagai kondisi beban mekanik (termasuk katrol kekakuan rendah), tidak
perlu menyesuaikan parameter gain
● Pergerakan halus dan andal, getaran rendah, peningkatan besar dalam akselerasi dan deselerasi
● Kemampuan kecepatan nol statis tanpa getaran
● Beradaptasi dengan motor servo hibrida NEMA34 dan NEMA 42 3 fase
● Frekuensi pulsa langkah maksimum 200KHZ
● Langkah mikro 400-60000 denyut nadi/rev
● Kisaran tegangan AC150-240V
● Proteksi arus berlebih, tegangan berlebih, dan posisi berlebih
● Enam tampilan tabung digital, mudah mengatur parameter dan memantau kondisi motor
2parameter Listrik
Tegangan masukan |
AC150 ~ 240V (Biasanya menggunakan 220VAC) |
Keluaran arus |
Puncak 6.0A (arus variabel berdasarkan beban) |
Arus Masuk Logika |
7~20mA |
Frekuensi |
0~200KHz |
Motor yang cocok |
servo motor nema 34 dan nema 42 hibrida 3 fase |
Resolusi pengkode |
1000 |
Resistansi isolasi |
≥ 500MΩ |
3.Parameter Lingkungan
Metode Pendinginan |
Pendinginan alami atau pendinginan udara paksa |
Lingkungan Kerja |
Hindari debu, kabut minyak dan gas korosif |
Suhu Operasi |
0~50℃ |
Kelembaban |
40 ~ 90% RH |
Getaran |
5,9m/s2Max |
Suhu penyimpanan |
-20℃~65℃ |
3.Port Antarmuka Daya1
Pelabuhan |
Simbol |
Definisi |
Keterangan |
1 |
L |
Konektor Daya Motor ke 220AC |
|
2 |
N |
|
|
3 |
NC |
Tidak Terhubung |
|
4 |
BR |
Resistor Pengereman |
Resistor rem eksternal yang terhubung antara Br dan P+ |
5 |
P+ |
Tegangan Bus DC |
4.Port Antarmuka Daya2
Pelabuhan |
Simbol |
Definisi |
NEMA34 |
NEMA42 |
1 |
U |
Port Koneksi Motor U |
Merah |
Hitam |
2 |
V |
Port Koneksi Motor V |
Hitam |
Coklat |
3 |
W |
Port Koneksi Motor W |
Biru |
Biru |
4 |
PE |
Tanah |
kuning |
kuning |
5 |
L |
Daya pengontrol Hubungkan ke 220VAC |
Rentang AC150-220V |
|
6 |
N |
|||
5.Port Antarmuka Sinyal Kontrol
Pelabuhan |
Simbol |
Definisi |
Keterangan |
3 |
PUL+ |
Input Sinyal Pulsa + |
|
4 |
PUL- |
Input Sinyal Pulsa - |
|
5 |
DIR+ |
Input Sinyal Arah + |
|
6 |
DIR- |
Input Sinyal Arah - |
|
7 |
ALM+ |
Keluaran Sinyal Alarm + |
|
8 |
ALM- |
Keluaran Sinyal Alarm - |
|
9 |
PEND+ |
Output Sinyal Posisi + |
|
10 |
PEND- |
Keluaran Sinyal Posisi - |
|
11 |
ENA+ |
Aktifkan Input Sinyal + |
|
12 |
ENA- |
Aktifkan Input Sinyal - |
|
23 |
OA+ |
Keluaran Encoder A |
Encoder Sinyal A, B, Z penggerak diferensial (26LS31) keluaran, keluaran tidak terisolasi. Jika motor hanya dengan A,B dua encoder saluran, lalu abaikan Z saluran. |
24 |
OA- |
||
25 |
OB+ |
Keluaran Encoder B |
|
26 |
OB- |
||
27 |
OZ+ |
Keluaran Encoder Z |
|
28 |
ONS- |
||
29 |
Bahasa Ceko |
Keluaran kolektor terbuka encoder Z |
|
30 |
GND |
Tanah |
|
6.Port Antarmuka Input Sinyal Encoder
Pelabuhan |
Simbol |
Definisi |
Keterangan |
1 |
Bahasa Indonesia: EA+ |
Encoder Masukan A+ |
Jika motor hanya dengan encoder dua saluran A, B, maka abaikan Z saluran. |
11 |
EA- |
Encoder A- Masukan |
|
2 |
Bahasa Indonesia: EB+ |
Masukan Encoder B+ |
|
12 |
EB- |
Encoder B- Masukan |
|
7 |
Mudah+ |
Encoder Masukan Z+ |
|
8 |
Mudah- |
Encoder Z-Masukan |
|
13 |
VCC |
+5V |
|
3 |
GND |
Tanah |
7.Port Antarmuka Komunikasi RS232
Pelabuhan |
Simbol |
Definisi |
1 |
NC |
Tidak Terhubung |
2 |
+5V |
Untuk HISU Eksternal |
3 |
TXD |
Port Transmisi RS232 |
4 |
GND |
Tanah |
5 |
RXD |
Port Penerima RS232 |
6 |
NC |
Tidak Terhubung |
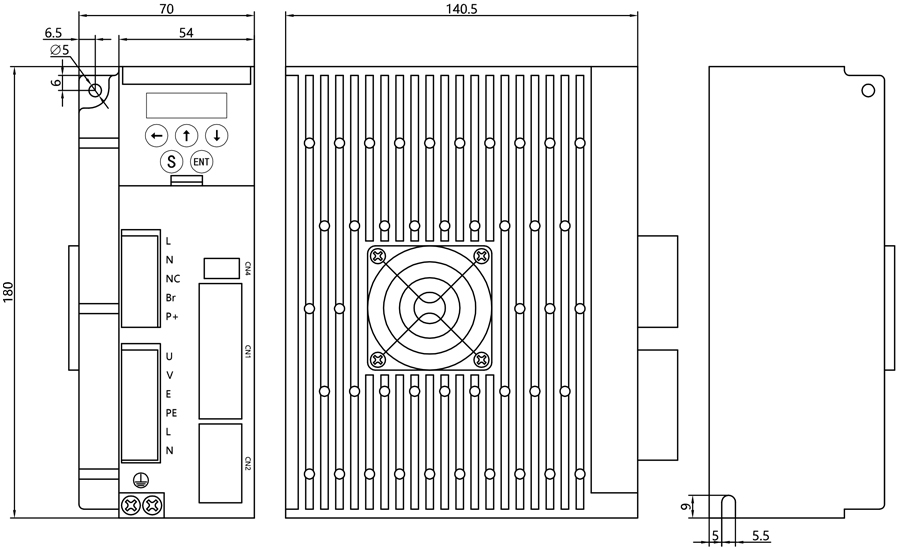
8. Dimensi Keseluruhan (satuan = mm)
9.Layanan Kustom
Kami menawarkan berbagai pilihan kustomisasi dalam desain, seperti jenis poros keluaran, konektor, rem, enkoder, dan gearbox, dll. Pengguna dapat memilih dengan fleksibel sesuai dengan kebutuhan aktual. Juga dapat dirancang & diproduksi sesuai dengan permintaan khusus.
10.Opsi
Kabel |
Flang |
Poros |
Baut |
|
|
|
|
Pengenkode |
Rem |
Gearbox |
Dan Lainnya |
|
|
|
+ |
11.Sertifikat
Kami telah melalui sertifikasi kualitas ISO-9001 dan memperoleh sejumlah paten aplikasi. Produk kami memiliki sertifikasi internasional seperti CE dan ROHS.

12.Ulasan

Hak Cipta © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Seluruh hak dilindungi. - Kebijakan Privasi










