

Halaman Utama > Produk > Motor dan Driver Stepper Loop Tertutup > Pengemudi stepper loop tertutup

CL86R adalah produk driver langkah loop tertutup yang mendukung protokol Modbus RTU berbasis bus RS485. Produk ini mengintegrasikan fungsi pengontrol sumbu tunggal, protokol komunikasi bus Modbus RTU standar, dudukan maksimum yang tersedia 32 sumbu, kontrol sinkron bus multi-sumbu, drive dengan kontrol posisi, kontrol kecepatan, posisi internal dan 16 kontrol kecepatan internal, mendukung nol, posisi absolut/relatif, JOG, dapat langsung menggunakan layar sentuh atau pengontrol dengan kontrol antarmuka RS485.
1.Fitur
● Mendukung protokol Modbus RTU standar pada bus RS485;
● Tidak kehilangan langkah, penempatan yang akurat;
● Arus disesuaikan sesuai dengan beban untuk beradaptasi dengan berbagai kondisi beban mekanis;
● Akselerasi dan deselerasi internal serta kontrol penyaringan halus, pengoperasian lebih lancar;
● Skor denda yang ditentukan pengguna;
● Mendukung posisi, kecepatan, kembali ke nol, JOG, berbagai posisi, berbagai kecepatan, dan mode lainnya;
● 7 port input, 3 fungsi port output dapat diprogram konfigurasinya;
● Rentang tegangan: AC20V~80V;
● Dengan arus berlebih, tekanan berlebih, perbedaan posisi berlebih, dan perlindungan lainnya;
2.Aplikasi Khas
Cocok untuk berbagai peralatan dan instrumen otomatisasi kecil dan menengah, seperti robot industri, mesin tekstil, mesin jahit industri khusus, mesin striping kawat, mesin penandaan, mesin pemotong, laser phototypesetting, plotters, alat mesin CNC, mesin ukiran, peralatan perakitan otomatis, dll. Efek aplikasi sangat baik di peralatan di mana pengguna mengharapkan kebisingan rendah
3.Indikator listrik
Tegangan catu daya |
AC 20~80V |
output |
Nilai puncak 8.0A (arus berubah dengan beban) |
Arus input DI |
daya 10~50mA |
Tegangan masukan DI |
+24VDC |
Jenis komunikasi |
RS485 |
Tingkat komunikasi maksimum |
115200bp s |
4.Parameter Lingkungan
Metode Pendinginan |
Pendingin alami atau radiator eksternal |
|
Lingkungan penggunaan |
Gunakan kesempatan |
Cobalah untuk menghindari debu, minyak dan gas korosif |
Suhu |
0~40℃ |
|
Kelembaban |
40 ~ 90% RH |
|
Getaran |
5,9m/s2Max |
|
Suhu penyimpanan |
-20℃~80℃ |
|
5.Port masukan daya
Nomor terminal |
Simbol |
Nama |
Jelaskan |
1 |
AC1 |
AC1 |
Tegangan AC20V ~80V |
2 |
AC2 |
AC2 |
6. Pelabuhan motor
Pin |
Definisi sinyal |
Jelaskan |
1 |
A + |
Belitan motor A adalah fase positif |
2 |
A - |
Belitan motor A adalah fase negatif |
3 |
B + |
Belitan motor B adalah fase positif |
4 |
B- |
Belitan motor B adalah fase negatif |
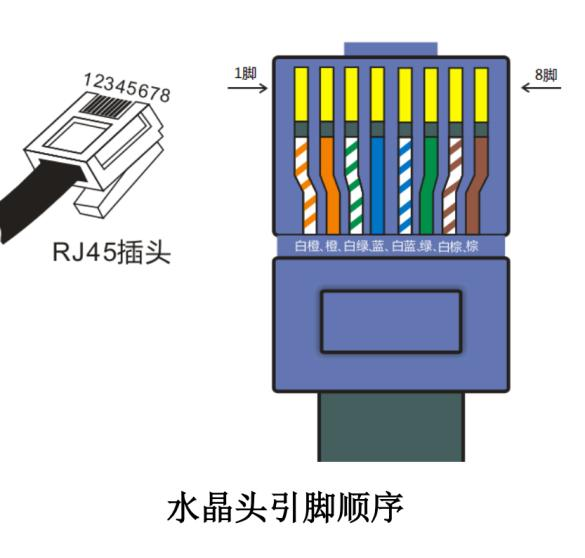
7.Port komunikasi RS485
Pin |
Definisi sinyal |
Warna kabel jaringan |
1 |
RS 485+ |
putih dan oranye |
2 |
RS 485- |
jeruk |
3 |
NC |
putih dan hijau |
4 |
NC |
biru |
5 |
GND |
putih dan biru |
6 |
GND |
hijau |
7 |
NC |
putih dan coklat |
8 |
NC |
coklat |
8.Port pengode
Pin |
Definisi |
Menjelaskan |
1 |
TAMENG |
Pelindung encoder |
2 |
NC |
RS485- |
3 |
NC |
|
4 |
NC |
|
5 |
EVCC |
Ujung utama catu daya encoder |
6 |
EGND |
Ujung negatif catu daya encoder |
7 |
NC |
|
8 |
NC |
|
9 |
Bahasa Indonesia: EB+ |
|
10 |
EB- |
|
11 |
Bahasa Indonesia: EA+ |
|
12 |
EA- |
|
9.Pelabuhan DI/DO
Nomor terminal |
Definisi simbol |
Menjelaskan |
1 |
DI0 |
Port input ujung tunggal: tegangan kerja yang valid 24V |
2 |
DI1 |
|
3 |
DI2 |
|
4 |
DI3 |
|
5 |
DI4 |
|
6 |
DI5 |
|
7 |
DI6 |
|
8 |
DIKOM |
Port input common port: kompatibel dengan metode sambungan anode dan katode umum |
9 |
Lakukan0 |
Port keluaran ujung tunggal |
10 |
DO1 |
|
11 |
DO2 |
|
12 |
Bahasa Indonesia: DOCOM |
Port output port umum: kutub negatif dari catu daya |
10. Indikasi status
PWR: Lampu indikator daya. Ketika daya menyala, indikator hijau selalu menyala.
ALM: Lampu indikator kesalahan. Lampu merah berkedip sekali dalam 3 detik: kesalahan arus lebih; Lampu merah berkedip 2 kali dalam 3 detik: kesalahan tegangan lebih; Lampu merah berkedip 7 kali dalam 3 detik: alarm kesalahan posisi.
11.Pengaturan sakelar DIP
CL86R menggunakan sakelar dial 5-bit untuk mengatur nomor stasiun penggerak dan sakelar dial 2-bit untuk mengatur laju gelombang komunikasi.
SW1-SW5: Nomor stasiun penggerak telah ditetapkan. SW6 hingga SW7: Kecepatan baud komunikasi penggerak. Dari nomor stasiun, kecepatan port komunikasi perlu dimodifikasi lagi.
Dari nomor stasiun |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
Bawaan |
PADA |
PADA |
PADA |
PADA |
PADA |
1 |
MATI |
PADA |
PADA |
PADA |
PADA |
2 |
PADA |
MATI |
PADA |
PADA |
PADA |
3 |
MATI |
MATI |
PADA |
PADA |
PADA |
4 |
PADA |
PADA |
MATI |
PADA |
PADA |
5 |
MATI |
PADA |
MATI |
PADA |
PADA |
6 |
PADA |
MATI |
MATI |
PADA |
PADA |
7 |
MATI |
MATI |
MATI |
PADA |
PADA |
8 |
PADA |
PADA |
PADA |
MATI |
PADA |
9 |
MATI |
PADA |
PADA |
MATI |
PADA |
10 |
PADA |
MATI |
PADA |
MATI |
PADA |
11 |
MATI |
MATI |
PADA |
MATI |
PADA |
12 |
PADA |
PADA |
MATI |
MATI |
PADA |
13 |
MATI |
PADA |
MATI |
MATI |
PADA |
14 |
PADA |
MATI |
MATI |
MATI |
PADA |
15 |
MATI |
MATI |
MATI |
MATI |
PADA |
16 |
PADA |
PADA |
PADA |
PADA |
MATI |
17 |
MATI |
PADA |
PADA |
PADA |
MATI |
18 |
PADA |
MATI |
PADA |
PADA |
MATI |
19 |
MATI |
MATI |
PADA |
PADA |
MATI |
20 |
PADA |
PADA |
MATI |
PADA |
MATI |
21 |
MATI |
PADA |
MATI |
PADA |
MATI |
22 |
PADA |
MATI |
MATI |
PADA |
MATI |
23 |
MATI |
MATI |
MATI |
PADA |
MATI |
24 |
PADA |
PADA |
PADA |
MATI |
MATI |
25 |
MATI |
PADA |
PADA |
MATI |
MATI |
26 |
PADA |
MATI |
PADA |
MATI |
MATI |
27 |
MATI |
MATI |
PADA |
MATI |
MATI |
28 |
PADA |
PADA |
MATI |
MATI |
MATI |
29 |
MATI |
PADA |
MATI |
MATI |
MATI |
30 |
PADA |
MATI |
MATI |
MATI |
MATI |
31 |
MATI |
MATI |
MATI |
MATI |
MATI |
Catatan: pengaturan nomor slave, ketika dalam default, dapat didefinisikan dengan mengatur register off slave drive kustom (0x0020) dari 1 hingga 31.
Tarif Porter Komunikasi |
SW6 |
SW7 |
9600 |
PADA |
PADA |
19200 |
MATI |
PADA |
38400 |
PADA |
MATI |
115200 |
MATI |
MATI |
Catatan : Ketika laju port komunikasi diatur ke 9600bp s, format data port serial tetap pada 8 bit data, tanpa pemeriksaan, dan 1 bit berhenti. Ketika diatur ke tiga laju aud lainnya, format data port serial ditentukan oleh register format data port serial (0x0021).
SW8: Resistansi terminal RS485, penggerak ujung bus harus menyetel sakelar dial ke AKTIF, dan penggerak lainnya harus disetel ke NONAKTIF.
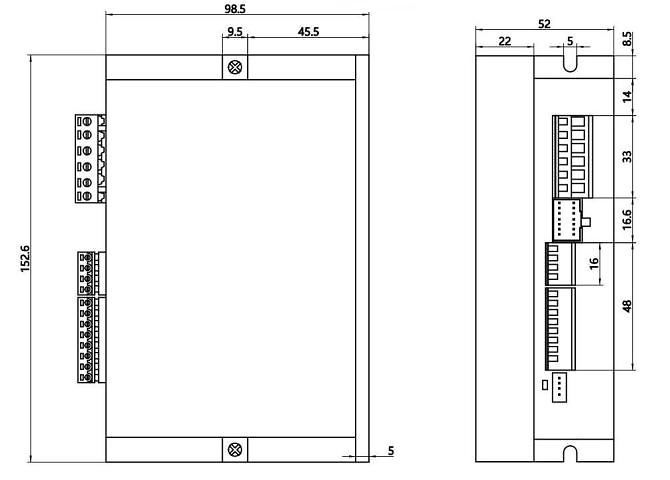
12. Dimensi Keseluruhan (satuan = mm)
13.Layanan Kustom
Kami menawarkan berbagai pilihan kustomisasi dalam desain, seperti jenis poros keluaran, konektor, rem, enkoder, dan gearbox, dll. Pengguna dapat memilih dengan fleksibel sesuai dengan kebutuhan aktual. Juga dapat dirancang & diproduksi sesuai dengan permintaan khusus.
14.Opsi
Kabel |
Flang |
Poros |
Baut |
|
|
|
|
Pengenkode |
Rem |
Gearbox |
Dan Lainnya |
|
|
|
+ |
15.Sertifikat
Kami telah melalui sertifikasi kualitas ISO-9001 dan memperoleh sejumlah paten aplikasi. Produk kami memiliki sertifikasi internasional seperti CE dan ROHS.

16.Ulasan

Hak Cipta © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Seluruh hak dilindungi. - Kebijakan Privasi










