

Homepage > Prodotti > servomotori passo-passo integrati > RS485 Servomotori a passo integrati

Il nostro JSS57R è un servomotore ibrido integrato basato su bus RS485 che supporta il protocollo Modbus RTU. Questo prodotto integra il servomotore ibrido e il driver e utilizza il protocollo di comunicazione standard Modbus RTU bus per il controllo. Rispetto alla tradizionale combinazione di motore passo a passo e motore passo a passo, il rendimento dei costi è superiore. Questo prodotto servo ibrido integrato integra i vantaggi del controllo della comunicazione del bus, del cablaggio semplice, senza passi persi, di bassa elevazione della temperatura, basso rumore, alta velocità, coppia elevata e basso costo. È un prodotto di controllo del movimento molto conveniente.
1.Facoltà
2.Specificativi elettrici
Modello NO. |
Angolo di passo |
Lunghezza del motore |
Corrente /Phase |
Resistenza /Phase |
Induttanza /Phase |
Torsione di tenuta |
(°) |
(L) mm |
A |
ω |
mH |
N.M |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Indicatori elettrici
Alimentatore |
DC24~48V, alimentazione raccomandata DC36V |
Corrente di uscita |
Pico 6,0A (corrente varia con il carico) |
Corrente di ingresso logica |
7~16mA, 10mA raccomandato |
Tipo di comunicazione |
RS485 |
velocità massima di comunicazione |
115200bps |
Alimentatore |
DC24~48V, alimentazione raccomandata DC36V |
5.Ambiente di utilizzo e parametri
Metodo di raffreddamento |
Raffreddamento naturale o radiatore esterno |
|
Ambiente di utilizzo |
Usate le occasioni |
Evita quanto più possibile polvere, olio e gas corrosivi |
Temperatura |
0~40℃ |
|
Umidità |
40~90%RH |
|
Vibrazione |
5,9 m/s2 Max |
|
Temperatura di conservazione |
-20℃~80℃ |
|
6.Definizione dell'interfaccia
(1)Port di ingresso di alimentazione
Numero del terminal |
Il simbolo |
Nome |
Illustrare |
1 |
+Vdc |
Terminale positivo di potenza CC |
DC+24V~48V Fornitore di alimentazione DC+36V raccomandato |
2 |
GND |
Terreno di alimentazione in corrente continua |
(2) Porta del segnale di controllo
Numero del terminal |
Il simbolo |
Nome |
Illustrare |
1 |
CCW+ |
Limite positivo positivo |
Supporto +5V~+24V |
2 |
CCW- |
Limite positivo negativo |
|
3 |
HOME+ |
L'origine meccanica è positiva |
|
4 |
- A casa. |
Origine meccanica negativa |
|
5 |
CW+ |
Limite negativo positivo |
|
6 |
CW- |
Limite negativo |
|
7 |
PEND+ |
Soluzione di segnale in posizione |
|
8 |
- Aspetta... |
Sulla base di una valutazione di conformità |
|
9 |
ALM+ |
Segnale di allarme in uscita |
|
10 |
- Alm... |
Sulla linea di comando |
(3) Porta di comunicazione RS485
Numero del terminal |
Il simbolo |
Nome |
1 |
RS485+ |
Interfaccia di comunicazione RS485 |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4)Indicazione dello stato
Indicatore di potenza. Quando è accesa, la luce verde è sempre accesa.
Indicatore di guasto. lampada rossa lampeggia una volta entro 3 secondi: guasto di cortocircuito di sovra corrente o di fase a fase; lampada lampeggia 2 volte ininterrottamente entro 3 secondi: guasto di sovra tensione;
La luce rossa lampeggia 7 volte ininterrottamente in 3 secondi: l'errore di posizione è al di fuori dell'allarme di tolleranza.
7.Impostazione dell'interruttore DIP
JSS57R utilizza un interruttore DIP a 6 bit per impostare il numero della stazione di guida e la velocità di comunicazione.
SW1~SW4: impostazione del numero della stazione di guida. SW5~SW6: velocità di comunicazione dei segnali. Dopo che il numero della stazione slave e il tasso di comunicazione sono stati modificati, deve essere acceso di nuovo per avere effetto.
Numero di schiavi |
SW1 |
SW2 |
SW3 |
SW4 |
predefinito |
ON |
ON |
ON |
ON |
1 |
OFF |
ON |
ON |
ON |
2 |
ON |
OFF |
ON |
ON |
3 |
OFF |
OFF |
ON |
ON |
4 |
ON |
ON |
OFF |
ON |
5 |
OFF |
ON |
OFF |
ON |
6 |
ON |
OFF |
OFF |
ON |
7 |
OFF |
OFF |
OFF |
ON |
8 |
ON |
ON |
ON |
OFF |
9 |
OFF |
ON |
ON |
OFF |
10 |
ON |
OFF |
ON |
OFF |
11 |
OFF |
OFF |
ON |
OFF |
12 |
ON |
ON |
OFF |
OFF |
13 |
OFF |
ON |
OFF |
OFF |
14 |
ON |
OFF |
OFF |
OFF |
15 |
OFF |
OFF |
OFF |
OFF |
Nota: l'impostazione del numero di stazione slave, quando è nel file predefinito, può definire il numero di stazione slave impostando il registro del numero di stazione slave (0x0020), il range è 1 ~ 31.
Tasso di comunicazione in baud |
SW5 |
SW6 |
9600 |
ON |
ON |
19200 |
OFF |
ON |
38400 |
ON |
OFF |
115200 |
OFF |
OFF |
Nota: quando la velocità di comunicazione è impostata su 9600 bps, il formato dei dati seriali è fissato a 8 bit di dati, senza parità e 1 bit di stop. Quando impostato su altre tre velocità di baud, il formato dei dati della porta seriale è determinato dal registro dei dati del formato della porta seriale (0x0021).
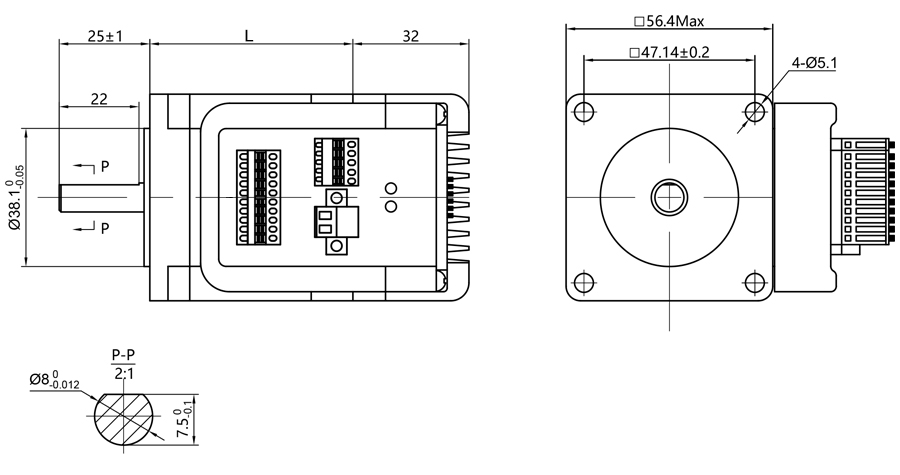
8.Dimensioni complessive
9.Certificato
Abbiamo superato il sistema di certificazione della qualità ISO-9001 e ottenuto numerosi brevetti di applicazione. I nostri prodotti hanno certificazioni internazionali come CE e ROHS.

10.Recensione

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Tutti i diritti riservati. - Informativa sulla privacy


