Homepage > Prodotti > Sistema servo > Servomotori a corrente continua integrati

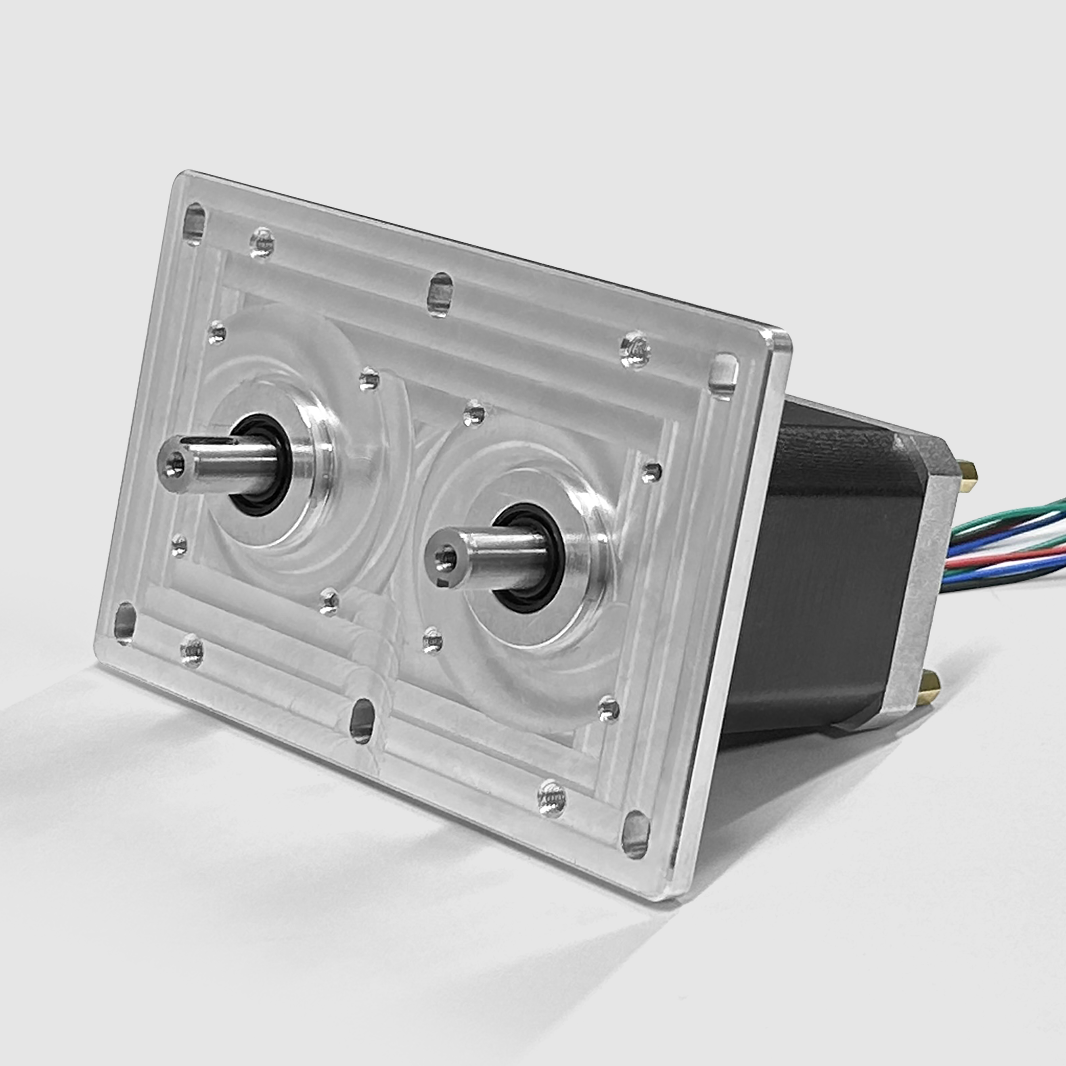
Il motore servo integrato JSV57 è un motore DC senza spazzole con telaio da 57 mm, integrato con un codificatore a 16 bit e un drive servo. Questo motore servo DC adotta un chip ARM a 32 bit e tecnologia di algoritmo di controllo ottimizzato, con un progetto eccellente e dimensioni compatte. Il design integrato di driver e motore non solo risparmia i collegamenti tra driver e motore, ma riduce anche efficacemente le interferenze elettromagnetiche tra le connessioni. Adotta una migliore tecnologia antivibrazione e bassa generazione di calore, risolvendo efficacemente i problemi di surriscaldamento e rumore.
1.Facoltà
2. Applicazione tipica
Adatto per vari tipi di attrezzature e strumenti di automazione piccoli e medi, come stampanti a getto d'inchiostro, macchine da intaglio piccole e medie, attrezzature di elaborazione elettronica, attrezzature di presa automatica, macchine utensili CNC speciali, attrezzature di imballaggio, ecc. È particolarmente efficace nelle attrezzature in cui gli utenti si aspettano un basso rumore e alta velocità.
3.Indicatori elettrici
Parametri |
JSV57 |
|||
Min |
Valore tipico |
Max |
Unità |
|
Corrente di uscita continua |
0 |
- |
6 |
A |
Tensione di alimentazione in ingresso |
24 |
36 |
48 |
VDC |
Corrente di ingresso logica |
7 |
10 |
16 |
mA |
Tensione in ingresso logico |
5 |
5 |
24 |
V |
Frequenza di impulso |
0 |
- |
200 |
kHz |
Resistenza dell'isolamento |
100 |
|
|
MΩ |
4.Specifiche elettriche
Unità |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Fasi |
|
3 |
||
Poli |
|
8 |
||
Tensione |
|
36VDC |
||
Potenza nominale |
A |
90 |
140 |
180 |
Coppia nominale |
N.M |
0.28 |
0.45 |
0.57 |
Coppia massima |
N.M |
0.8 |
1.1 |
1.5 |
Velocità Nominale |
rpm |
3000 |
3000 |
3000 |
Corrente Nominali |
A |
3.3 |
5 |
6.6 |
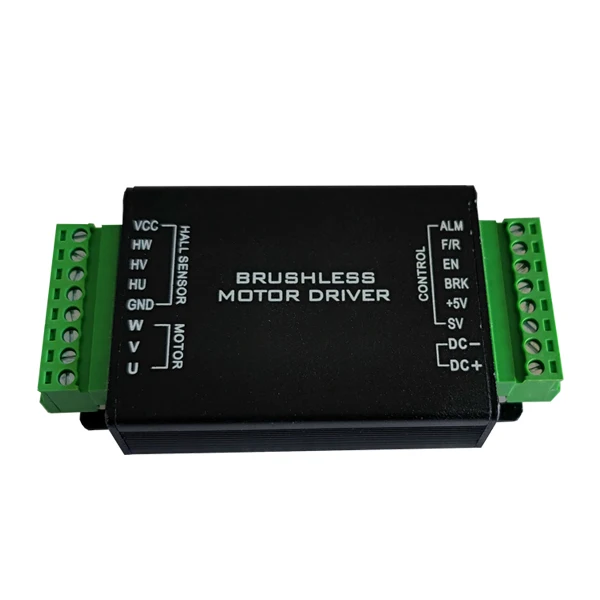
5.Interfaccia di guida e introduzione al cablaggio
(1)Port di ingresso di alimentazione
Numero del terminal |
Il simbolo |
Nome |
Illustrare |
1 |
+Vdc |
Terminale positivo di potenza CC |
DC+24V~48V |
2 |
GND |
Terreno di alimentazione in corrente continua |
0V |
(2) Porta del segnale di controllo
Numero del terminal |
Il simbolo |
Nome |
Illustrare |
1 |
PUL + |
Ingresso impulsivo + |
Compatibile con segnali 5V~24V |
2 |
PUL - |
Ingresso impulsivo - |
|
3 |
DIR + |
Ingresso direzione + |
|
4 |
DIR - |
Ingresso direzione - |
|
5 |
ENA + |
Abilita input + |
|
6 |
ENA - |
Abilita input - |
|
7 |
PED + |
Segnale di posizione in uscita + |
|
8 |
PED - |
Uscita segnale posizione - |
|
9 |
ALM + |
Uscita segnale allarme + |
|
10 |
ALM - |
Uscita segnale di allarme - |
(3) Porta di comunicazione RS232
Numero del terminal |
Il simbolo |
Nome |
Illustrare |
1 |
NC |
|
|
2 |
RX |
Ricevitore RS232 |
|
3 |
GND |
Terrazzo di potenza |
|
4 |
TX |
Trasmettitore RS232 |
|
5 |
+5V |
Terminale di alimentazione positiva |
(Questo non deve essere connesso) |
(4)Indicazione dello stato
PWR: Indicatore di alimentazione. L'indicatore verde si accende quando viene applicata l'alimentazione.
ALM: Indicatore di guasto. Quando si verifica un guasto, l'indicatore lampeggia in un ciclo di 5 secondi; quando il guasto viene eliminato dall'utente, il LED rosso rimane sempre spento. Il LED rosso lampeggia ad una frequenza di 2Hz, dove il LED è acceso per 200ms e spento per 300ms. Il numero di volte in cui il LED rosso lampeggia in 5 secondi rappresenta informazioni diverse sui guasti, e la relazione specifica è mostrata nella seguente tabella:
Numero di serie |
Numero di lampi |
Descrizione del guasto |
1 |
1 |
Guasto per corrente eccessiva |
2 |
2 |
Allarme di tolleranza di posizione errata |
3 |
3 |
Guasto dell'encoder |
4 |
4 |
Sovraccarico del motore |
5 |
5 |
Tensione eccessiva sulla linea |
6 |
6 |
Sottotensione dell'autobus |
6.Impostazione dell'interruttore DIP
7.Filtro comando di ingresso
Quando l'interruttore DIP S1 è impostato su ON, viene abilitata la funzione di filtro di ingresso e il tempo di filtro è configurato tramite il registro 2603; questa funzione è efficace solo quando il motore è sbloccato;
Il driver JSV57 utilizza un interruttore DIP a sei posizioni per impostare la precisione della suddivisione e la direzione di rotazione del motore.
(1) Impostazione della direzione
Direzione |
S2 |
CCW |
OFF |
CW |
Su |
(2) Impostazione microstep
Pulso/REV |
S3 |
S4 |
S5 |
S6 |
Predefinito |
Su |
Su |
Su |
Su |
400 |
Su |
Su |
Su |
Su |
800 |
OFF |
Su |
Su |
Su |
1600 |
Su |
OFF |
Su |
Su |
3200 |
OFF |
OFF |
Su |
Su |
6400 |
Su |
Su |
OFF |
Su |
12800 |
OFF |
Su |
OFF |
Su |
25600 |
Su |
OFF |
OFF |
Su |
51200 |
OFF |
OFF |
OFF |
Su |
1000 |
Su |
Su |
Su |
OFF |
2000 |
OFF |
Su |
Su |
OFF |
4000 |
Su |
OFF |
Su |
OFF |
5000 |
OFF |
OFF |
Su |
OFF |
8000 |
Su |
Su |
OFF |
OFF |
10000 |
OFF |
Su |
OFF |
OFF |
20000 |
Su |
OFF |
OFF |
OFF |
40000 |
OFF |
OFF |
OFF |
OFF |
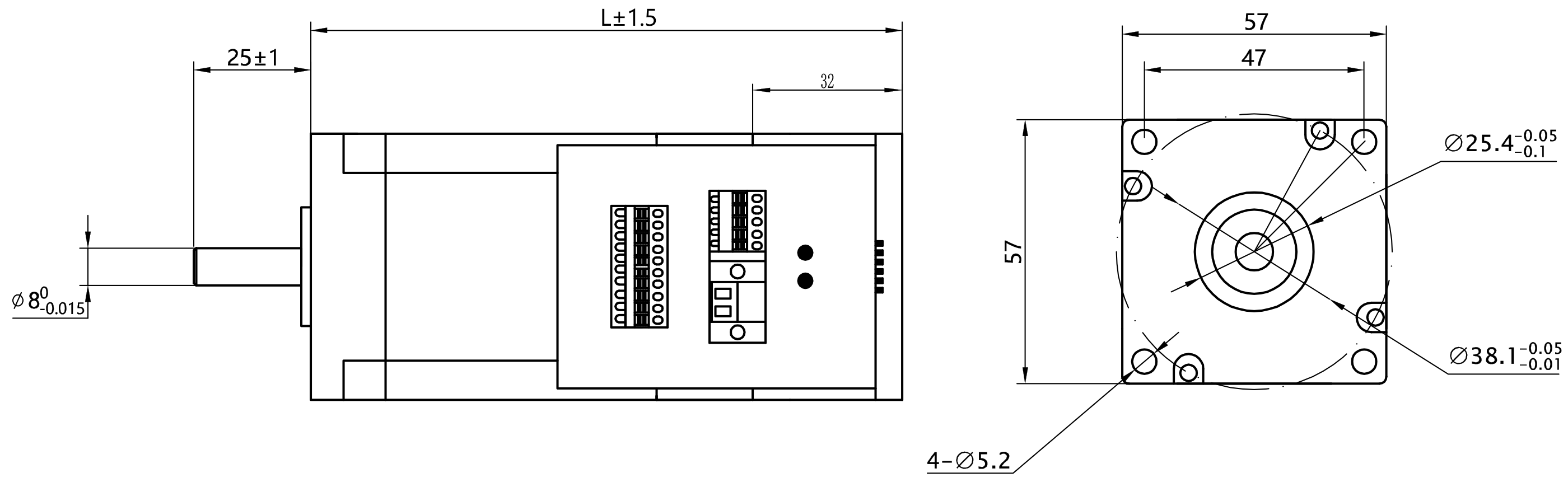
8.Dimensioni del motore(unità=mm)
9.Certificato
Abbiamo superato il sistema di certificazione della qualità ISO-9001 e ottenuto numerosi brevetti di applicazione. I nostri prodotti hanno certificazioni internazionali come CE e ROHS.

10.Recensione

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Tutti i diritti riservati. - Informativa sulla privacy