

Hōmupeーji > 製品 > インテグレーテッドステッピングサーボモータ > RS485 統合式ステップサーボモーター

当社の JSS57R は、Modbus RTU プロトコルをサポートする RS485 バスに基づく統合ハイブリッド サーボ モーターです。この製品はハイブリッド サーボ モーターとドライバーを統合し、制御には標準の Modbus RTU バス通信プロトコルを使用します。従来のステッピング モーター ドライバーとステッピング モーターの組み合わせと比較して、コスト パフォーマンスが高くなります。この統合ハイブリッド サーボ製品は、バス通信制御、配線が簡単、ステップのロスがない、温度上昇が低い、ノイズが少ない、高速、高トルク、低コストなどの利点を統合しています。これは、非常にコスト効率の高いモーション コントロール製品です。
1.特徴
2.電気仕様
モデル番号 |
ステップアングル |
運動器の長さ |
現在 /Phase |
抵抗 /Phase |
インダクタンス /Phase |
保持トルク |
(°) について |
(L) ミリ |
A |
ω |
mH |
N.M<br> |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
型番 |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
型番 |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.電気表示
電源 |
DC24〜48V、推奨電源DC36V |
出力電流 |
ピーク6.0A(電流は負荷に応じて変化します) |
論理入力電流 |
7〜16mA、10mA推奨 |
通信の種類 |
RS485 |
最大通信速度 |
115200bps |
電源 |
DC24〜48V、推奨電源DC36V |
5.使用環境とパラメータ
冷却方法 |
自然冷却器や外部の散熱器 |
|
環境使用 |
機会を活用する |
ほこり、油、腐食性ガスをできるだけ避けてください |
温度 |
0~40℃ |
|
湿度 |
40~90%RH |
|
振動 |
速度は最大5.9m/s2 |
|
保管温度 |
-20℃~80℃ |
|
6.インターフェース定義
(1) 電源入力ポート
ターミナル番号 |
シンボル |
氏名 |
図解 |
1 |
+Vdc |
DC電源の正端 |
DC+24V~48V 推奨DC+36V電源 |
2 |
GND |
DC電源の固定 |
(2) 制御信号ポート
ターミナル番号 |
シンボル |
氏名 |
図解 |
1 |
CCW+ |
正の限界 正 |
+5V~+24Vをサポート |
2 |
CCW- |
正の限界負 |
|
3 |
ホーム+ |
機械的な起源は肯定的である |
|
4 |
家- |
負の機械的起源 |
|
5 |
CW+ |
負の限界 正 |
|
6 |
CW- |
負の限界負 |
|
7 |
ペンデント+ |
ポジション信号の正の出力 |
|
8 |
保留中-- |
位置表示信号の負出力 |
|
9 |
ALM+ |
警報信号が出力されています |
|
10 |
ALM- |
信号の出力 |
(3)RS485通信ポート
ターミナル番号 |
シンボル |
氏名 |
1 |
RS485+ |
RS485通信インターフェース |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4) 状態の表示
電力指標です オンになると,緑色の指示灯が常に点灯します.
障害表示 超電流または相間短路障害:赤光が3秒以内に1回点滅する.
赤色灯が3秒間に7回連続で点滅する.位置誤差は,容量アラームを超えている.
7.DIPスイッチの設定
JSS57R は 6 ビット DIP スイッチを使用して、ドライブ ステーション番号と通信ボー レートを設定します。
SW1〜SW4:ドライブステーション番号設定。SW5〜SW6:ドライブ通信ボーレート。スレーブステーション番号と通信ボーレートを変更した後、変更を有効にするには再度電源を入れる必要があります。
奴隷番号 |
SW1 |
SW2 |
SW3 |
SW4 |
デフォルト |
On |
On |
On |
On |
1 |
オフ |
On |
On |
On |
2 |
On |
オフ |
On |
On |
3 |
オフ |
オフ |
On |
On |
4 |
On |
On |
オフ |
On |
5 |
オフ |
On |
オフ |
On |
6 |
On |
オフ |
オフ |
On |
7 |
オフ |
オフ |
オフ |
On |
8 |
On |
On |
On |
オフ |
9 |
オフ |
On |
On |
オフ |
10 |
On |
オフ |
On |
オフ |
11 |
オフ |
オフ |
On |
オフ |
12 |
On |
On |
オフ |
オフ |
13 |
オフ |
On |
オフ |
オフ |
14 |
On |
オフ |
オフ |
オフ |
15 |
オフ |
オフ |
オフ |
オフ |
注: スレーブ ステーション番号設定は、デフォルト ファイル内にある場合、カスタム ドライブ スレーブ ステーション番号レジスタ (0x0020) を設定することによってスレーブ ステーション番号を定義できます。範囲は 1 ~ 31 です。
通信ボーレート |
SW5 |
SW6 |
9600 |
On |
On |
19200 |
オフ |
On |
38400 |
On |
オフ |
115200 |
オフ |
オフ |
注意: 通信ボーレートが 9600bps に設定されている場合、シリアル データ形式は 8 データ ビット、パリティなし、および 1 ストップ ビットに固定されます。他の 3 つのボーレートに設定されている場合、シリアル ポート データ形式はシリアル ポート データ形式レジスタ (0x0021) によって決定されます。
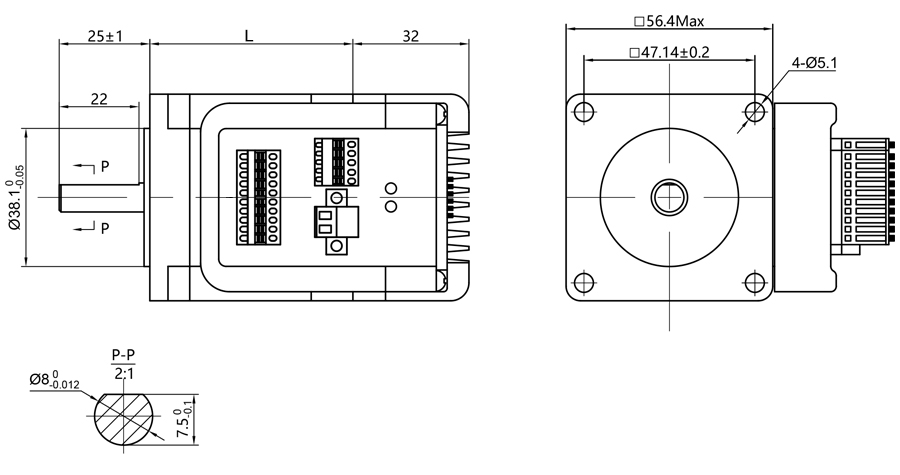
8.全体の寸法
9.証明書
私たちはISO-9001品質認証システムを取得し、多数の応用特許を獲得しました。当社の製品はCEやROHSなどの国際認証を取得しています。

10.レビュー

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. すべての権利を保有。 - プライバシーポリシー


