

Pagina Prima > Producta > motores Servi Graduum Integrati > RS485 Integrated Stepper Servo Motors

Nostrum JSS57R est motoribus servo hybridis integratis innixus RS485 bus, qui Modbus RTU protocollum sustinet. Productum hoc integrat servo motore hybridorum et agitatori, et utitur norma Modbus RTU protocollo communicationis bus ad imperium. Comparari cum tradito compositione motoris stepper agitatoris et stepper motoris, sumptus perficiendi altior est. Hoc productum servo hybrid integratur commoda communicationis commercii commoda, simplex wiring, nulla vestigia amissa, humilis temperatura oritur, humilis strepitus, celeritas princeps, torques summus et humilis sumptus. Motus sumptus-efficax admodum productum est imperium.
1.Features
2.Electrical specifications
Numerus Modeli |
Gradus Anglus |
Motor Longitudo |
Current /Phase |
Resistenta /Phase |
Inductantia /Phase |
Tenens Torque |
(°) |
(L)mm |
A |
ω |
mH* |
N.m |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Electrical Indicatores
Fontem electricitatis |
DC24~48V, commendata potentia suppeditat DC36V |
Output Current |
Apicem 6.0A (variatur cum onus current) |
Logica initus current |
7~16mA, 10mA commendatur |
Typus communicationis |
RS485 |
maximum communicationis rate |
115200bps |
Fontem electricitatis |
DC24~48V, commendata potentia suppeditat DC36V |
5.Usage elit ac parametri
Modus refrigerationis |
Naturalis refrigerationem seu externum radiator |
|
Usus environment |
Usus occasiones |
Fuge pulverem, oleum et vapores mordax quam maxime |
Temperatura |
0~40℃ |
|
Humiditas |
40~90% RH |
|
Vibratio |
5.9m/s²Max |
|
Temperatura recondita |
-20℃~80℃ |
|
6.Interface definition
(1)Portus potentiae input
Terminatio numerus |
Symbolum |
Nomen |
Illustrate |
1 |
+Vdc |
DC potentia positivum terminatio |
DC+24V~48V Commendatur DC + 36V potentia copia |
2 |
GND |
Potestas dc terra |
2)Imperium signum portum
Terminatio numerus |
Symbolum |
Nomen |
Illustrate |
1 |
CCW+ |
Positivum terminum positivum |
Support +5V~ +24V |
2 |
CCW- |
Positivum terminum negativum |
|
3 |
HOME+ |
Mechanica originis est positivum |
|
4 |
HOME- |
Mechanica negans originis |
|
5 |
CW+ |
Negans terminus positive |
|
6 |
CW- |
Negans modus negativus |
|
7 |
PEND+ |
In loco signo positivo output |
|
8 |
PEND-- |
In- positio signum negativum output |
|
9 |
ALM+ |
Terrorem signum est outputting |
|
10 |
ALM- |
Signum terrorem negans output |
3)RS485 communicationis portum
Terminatio numerus |
Symbolum |
Nomen |
1 |
RS485+ |
RS485 communicationis |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
4)Status indication
PWR: Indicatores potentiae. Cum potentia activa, viridis indicator lux semper lucet.
ALM: Indicatores defectus. Lux rubra semel coruscat intra 3 secundas: super-cursum vel defectus circuitus inter phase; Lux re temporum coruscat 2 vicibus continue intra 3 secundas: Defectus super-voltage;
Lux rubra coruscat 7 vicibus continue intra 3 secundas: error positionis extra tolerantiam alarm.
7.DIP switch occasum
JSS57R utitur VI frenum SUMMERGO switch ad constituendum stationem coegi numerum et communicationem baud rate.
SW1~ SW4: Coegi statione numerus occasus. SW5~SW6: Coegi communicationem baud rate. Postquam servi statio numero et communicatione haud rate modificatur, necesse est ut rursus ad effectum adduci possit.
Numerus servorum |
SW1 |
SW2 |
SW3 |
SW4 |
praedefinitum |
IN |
IN |
IN |
IN |
1 |
OFF |
IN |
IN |
IN |
2 |
IN |
OFF |
IN |
IN |
3 |
OFF |
OFF |
IN |
IN |
4 |
IN |
IN |
OFF |
IN |
5 |
OFF |
IN |
OFF |
IN |
6 |
IN |
OFF |
OFF |
IN |
7 |
OFF |
OFF |
OFF |
IN |
8 |
IN |
IN |
IN |
OFF |
9 |
OFF |
IN |
IN |
OFF |
10 |
IN |
OFF |
IN |
OFF |
11 |
OFF |
OFF |
IN |
OFF |
12 |
IN |
IN |
OFF |
OFF |
13 |
OFF |
IN |
OFF |
OFF |
14 |
IN |
OFF |
OFF |
OFF |
15 |
OFF |
OFF |
OFF |
OFF |
Nota: servus numerus stationis occasus, cum in fasciculo defectus sit, numerum statio servarum definire potest, ponendo morem servilem numerum actis mandare stationem (0x0020), distributio est 1~31.
Communication baud rate |
SW5 |
SW6 |
9600 |
IN |
IN |
19200 |
OFF |
IN |
38400 |
IN |
OFF |
115200 |
OFF |
OFF |
Nota: Cum communicatio baud rate ad 9600bps posita est, forma notitiarum serialium ad 8 particulas datas fixas est, nulla pari, et 1 frenum sistendum. Cum ad alias tres baud rates profectus est, forma portus datae serial determinatur a mandare formarum formarum formarum serialium (0x0021).
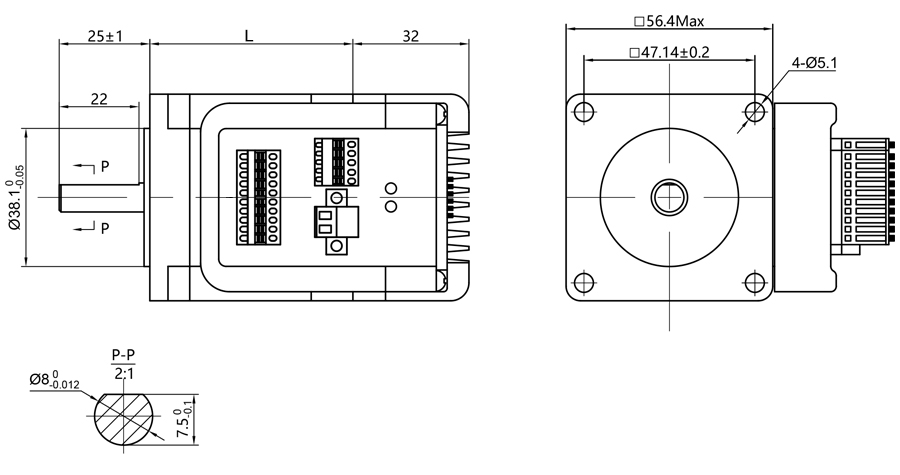
8.Dimentiones Universales
9. Certificatum
Nos iam systema certificationis qualitatis ISO-9001 transivimus et multas patentes applicationis consecuti sumus. Producta nostra certificationes internationales sicut CE et ROHS habent.

10. Recensio

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Omnia iura reservata. - Politica Privata


