Pagina Prima > Producta > Servo Systema > Integrata DC Servo Motoria

Motor servus integratus JSV57 est motor BLDC cum dimensione quadrata 57mm, qui integratur cum codificatore 16-bit et impulsione servo. Hic motor servus DC utitur chip ARM 32-bit et technologia algorithmi controlis optimizati, cum excellenti design et parvo volumine. Designum integratum inter impulsorem et motorem non solum salvat connexionem inter impulsorem et motorem, sed etiam efficaciter reducit disturbationem electromagnetica inter connexionem. Utitur technologia melioris anti-vibrationis et minimae generationis caloris, effective solvens problemata caloris et sonitus.
1.Features
2.Typical Application
Convenit ad varias machinas et instrumenta automatisma parva et media, sicut imprimatrices insectoriae, machinae incisoriae parvae et medie, instrumenta processuum electronicorum, machinae apprehensionis automatae, CNC machinae speciales, machinae confectionis, etc. Praecipue efficax est in machinis ubi usores exspectant minimum sonum et altam velocitatem.
3.Electrical Indicatores
Morbi laoreet |
JSV57 |
|||
Min |
Valor typicus |
MAX |
Unitas |
|
Continuus cursus output |
0 |
- |
6 |
A |
Input voltius potentiae |
24 |
36 |
48 |
VDC |
Logica initus current |
7 |
10 |
16 |
ma |
Voltius input logicae |
5 |
5 |
24 |
V |
Pulsus frequency |
0 |
- |
200 |
kHz |
Resistens Insulationis |
100 |
|
|
MΩ |
4.Specificatio Electrica
Unitas |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Phases |
|
3 |
||
Poles |
|
8 |
||
Voltage |
|
36VDC |
||
Potentia Aestimata |
W |
90 |
140 |
180 |
Rated torque |
N.m |
0.28 |
0.45 |
0.57 |
Apicem torques |
N.m |
0.8 |
1.1 |
1.5 |
Celeritas Aestimata |
rpm |
3000 |
3000 |
3000 |
Rated Current |
A |
3.3 |
5 |
6.6 |
5.Introductio ad interfaciam propulsionis et connexionem filorum
(1)Portus potentiae input
Terminatio numerus |
Symbolum |
Nomen |
Illustrate |
1 |
+Vdc |
DC potentia positivum terminatio |
DC+24V~48V |
2 |
GND |
Potestas dc terra |
0V |
2)Imperium signum portum
Terminatio numerus |
Symbolum |
Nomen |
Illustrate |
1 |
PUL + |
Pulsus initus + |
Consonat cum signis 5V~24V |
2 |
PUL - |
Pulsus initus - |
|
3 |
DIR + |
Directio initus + |
|
4 |
DIR - |
Directio initus - |
|
5 |
ENA + |
Admitte initus + |
|
6 |
ENA - |
Admitte initus - |
|
7 |
PED + |
Position signum output + |
|
8 |
PED - |
Position signum output - |
|
9 |
ALM + |
Terrorem signum output + |
|
10 |
ALM - |
Terrorem signum output - |
3)RS232 communicationis portum
Terminatio numerus |
Symbolum |
Nomen |
Illustrate |
1 |
NC |
|
|
2 |
RX |
RS232 accipientis |
|
3 |
GND |
Potentia terram |
|
4 |
TX |
RS232 mittentis |
|
5 |
+5V |
Positivum terminatio |
(Hoc coniungendum non est) |
4)Status indication
PWR: Indicatore Energeticus. Luminet indicatore viridis cum energia applicatur.
ALM: Indicatore Fault. Cum fault accidit, luminet indicatore intermittebat in circulo 5 secundorum; cum fault solvitur ab usuariis, semper extinctionis LED rubeus. LED rubeus scintillat ad frequentiam 2Hz, ubi LED lucet pro 200ms et extinctionis pro 300ms. Numerus vicissim LED rubeus scintillat in 5 secundis repraesentat varias informationes fault, et relatio specifica monstratur in tabula sequenti:
NUMERUS SERIALES |
Numerus scintillationum |
Descriptio Fault |
1 |
1 |
Fault super-curentis |
2 |
2 |
Error positionis tolerance alarm |
3 |
3 |
Fault codicis rotativi |
4 |
4 |
Motoris oneris excessivi |
5 |
5 |
Super-voltage bus |
6 |
6 |
Sub-voltage bus |
6.DIP switch occasum
7.Filtratio mandatorum input
Cum commutator DIP S1 est ad INCLUSA configuratus, functio filtrationis input activatur, et tempus filtrationis configuratur per registrum 2603; haec functio est efficax solum cum motor solvitur;
Motor JSV57 utitur commutatore DIP sex positionum ad configurationem praecisionis subdivisionis et directionis rotationis motoris.
(1)Configuratio directionis
Directio |
S2 |
ACW |
OFF |
CW |
IN |
(2)Configuratio microstep
Pulsus/REV |
S3 |
S4 |
S5 |
S6 |
Praedefinitum |
IN |
IN |
IN |
IN |
400 |
IN |
IN |
IN |
IN |
800 |
OFF |
IN |
IN |
IN |
1600 |
IN |
OFF |
IN |
IN |
3200 |
OFF |
OFF |
IN |
IN |
6400 |
IN |
IN |
OFF |
IN |
12800 |
OFF |
IN |
OFF |
IN |
25600 |
IN |
OFF |
OFF |
IN |
51200 |
OFF |
OFF |
OFF |
IN |
1000 |
IN |
IN |
IN |
OFF |
2000 |
OFF |
IN |
IN |
OFF |
4000 |
IN |
OFF |
IN |
OFF |
5000 |
OFF |
OFF |
IN |
OFF |
8000 |
IN |
IN |
OFF |
OFF |
10000 |
OFF |
IN |
OFF |
OFF |
20000 |
IN |
OFF |
OFF |
OFF |
40000 |
OFF |
OFF |
OFF |
OFF |
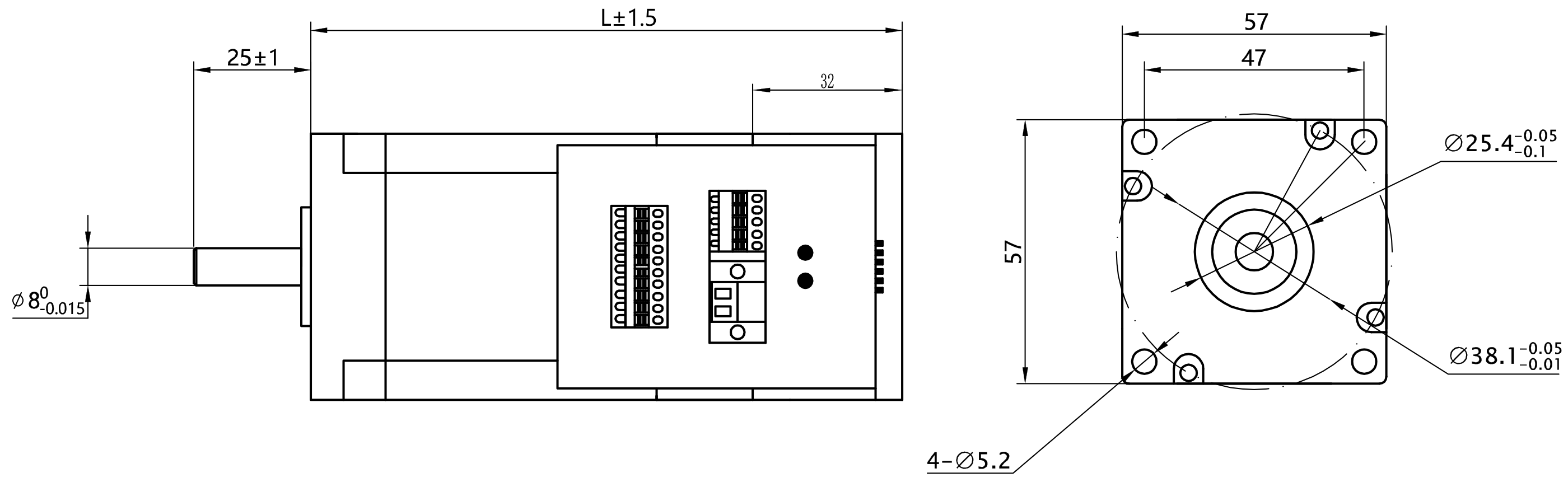
8. Dimensiones Motoris (unitas=mm)
9. Certificatum
Nos iam systema certificationis qualitatis ISO-9001 transivimus et multas patentes applicationis consecuti sumus. Producta nostra certificationes internationales sicut CE et ROHS habent.

10. Recensio

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Omnia iura reservata. - Politica Privata