Quid est Motor Servo?
A motor servo consistit typice de integro systemate servo quod motorem, encoder de alta praecisione (vel alio sensor feedback), servo drive, et host controller includit. Dissimilis a conventionalibus motoribus, hoc systema in closed-loop feedback control mechanism dependet, praecisionem altam praebens positionis, velocitatis, et torque in tempore reali secundum mandata, etiam celerem responsionem offerens.
Quomodo Functur Motor Servo?
Praecisio motoris servanti oritur ex systemate suo de controllo anulo clauso. Haec systema praecisionem altam attingit per cyclum perpetuum mandati-refeedback-correctionis: primo controller superioris emit signum mandati locum destinatum specificans; deinde drive servans signum in currentem alti ponderis amplificat ad motorem movendum. Pariter, encoder vel sensor motoris integratus locum et velocitatem realem servat tempore reali et refeedback ad drive praebet. Drive loca comparat continua per strategias controllo ut algorithimi PID. Cum deviatio detegitur (ut propter mutationes oneris), statim currentem output regolat ad correctionem dynamicam. Totus processus intra milliseconds compleris, motore ad locum destinatum celeriter attingere et accurate retinere, stabile manens etiam sub interventu externo. Haec solutio notabiliter superat solutio apertum anuli ut motores passuales in terminis torquei, velocitatis et controllo positionis.
Genera servo motorum
Motores servo dividi possunt in Motores Servo CC et Motores Servo CA secundum typum fons electricitatis.
-
Ac servo motores
Sub conditionibus electricitatis CA, motores praecipue in motores servo synchronos magnetis permanentis (PMSM) et motores servo asynchronos (ASM) classificantur, secundum principium operationis et structuram. PMSM praecisionem altam et responsionem celerem offerunt, et late in applicationibus controlis praecisi ut robotae industriales, torni numerici computatricales, machinae semiconductoriae, et lineae productio automatizatae utuntur. Ex altera parte, motores servo asynchroni magis apti sunt ad machinas cum potestate alta, celeritate alta, et requisitis praecisionis modicis, ut centrifugae, compressores, etc.
-
Motoribus servo DC
Cum potestate DC freta sunt, motores servos praecipue distinguuntur in Motores Servos CC Cepis et Motores Servos CC Sine Cepis (BLDC), secundum structuram et modum operandi. Differentia principalis inter eos in methodo commutationis consistit: motores servos CC cepis usurae commutationis mechanicum, confisi in contactu physico inter caepas et commutatorem; BLDC motores servos autem commutatione electronica utuntur, sensores positionis et actuatores adhibentes praecisum imperium. Nunc BLDC motores servorum, praecipuis suis praestantiae, fiduciae, et vitae rationibus, paulatim cepis motorem substituerunt et electio principis applicationum servorum altissimae praecisionis et fiduciae sunt.
Applicationes Motorum Servorum
Facultates peculiares motorum servorum eos innumerabilibus campis necessarios reddunt:
- Automatia Industrialis: Robotica, machining CNC, apparatus impacandorum, etc.
- Robotica: Artus in armis et cruribus roboticis cum motu praeciso regendi.
- Electronica ad Consumum: Move the lens in camera ad obtinendum focus automaticum et regendum motum capitis scribentis in impressoribus 3D altiorem.
- Aequipamentum Medicum: Imbuebant instrumenta praecisa in robotis chirurgicis et regabant pumpas fluidorum in machinis diagnosticis.
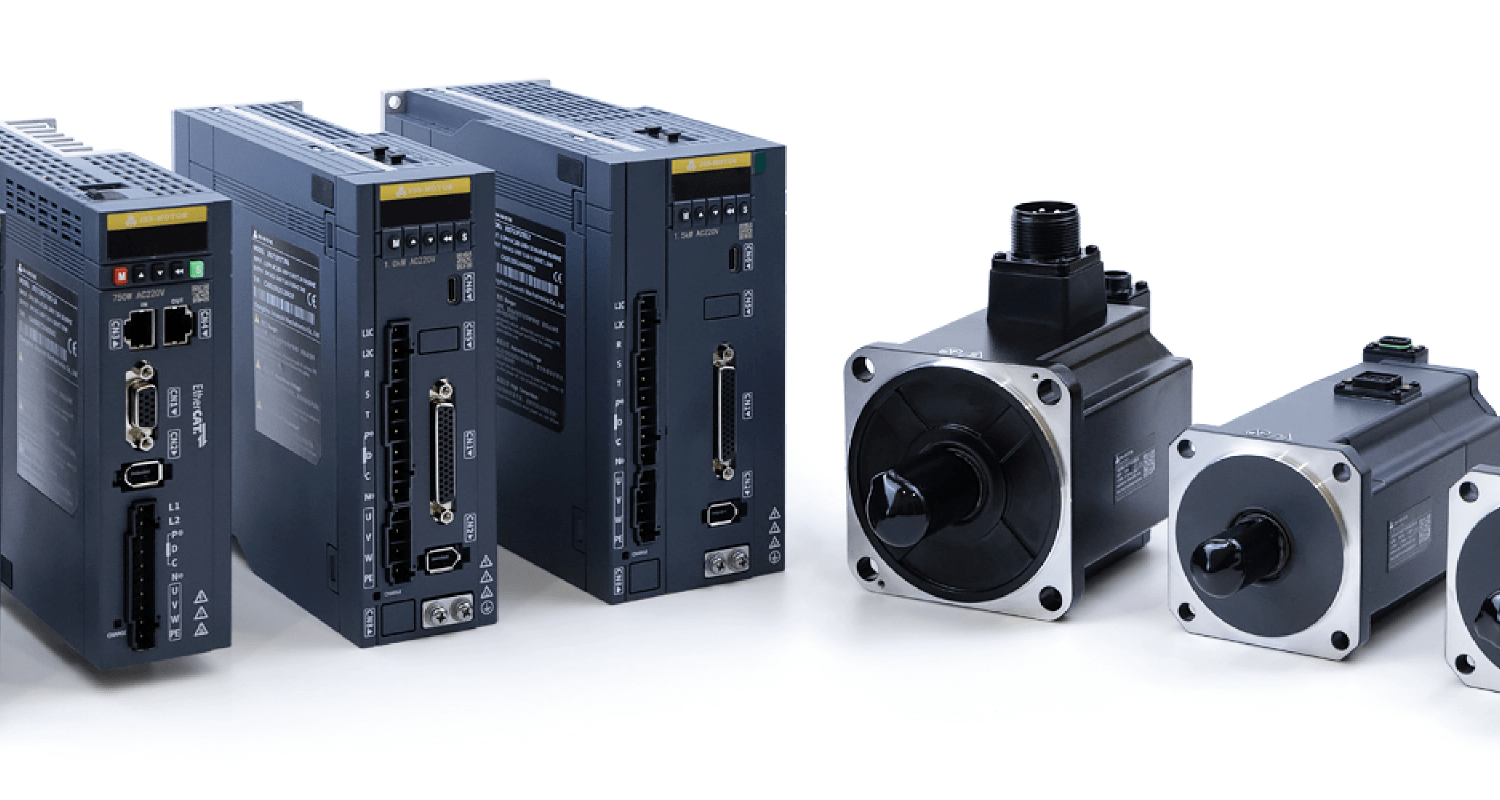
Producta Servo Motoris Prima
-
NEMA 23 Motor DC Servo Integrum : motor DC sine spazzulis in mensura 57mm iunctus cum codificatore 16-bit et cum impulsiuncula servo.
-
Motor Servo AC EtherCAT : Motor Servo qui copiat latitudinem communissimam de 0.05kW ad 7.5kW cum codificatore magnetico absoluto multiplex multi-versus 17-bit. Impulsiuncula servo patet systemata potestatis tam singulis quam trifasibus cum communicatione EtherCAT.
-
Motor Servo AC Pulsus : Motor Servo qui copiat latitudinem communissimam de 0.05kW ad 7.5kW cum codificatore magnetico absoluto multiplex multi-versus 17-bit. Impulsiuncula servo patet systemata potestatis tam singulis quam trifasibus cum communicatione Pulsus.