

Hjem > Produkter > Closed Loop Stepper Motors Og Drivere > Støtttrådar i stengd sirkel

Vår CL57R er et stepper-produkt med lukket sløyfe basert på RS485 Modbus som støtter Modbus RTU-protokollen. Dette produktet integrerer en enkelt-akse kontrollerfunksjon og bruker standard Modbus RTU buss kommunikasjonsprotokoll for kontroll. Den kan montere maksimalt 32 akser og kan realisere flerakset busssynkronstyring. Føreren har posisjonskontroll, hastighetskontroll, 16-segments intern posisjon og 16-segments intern hastighetskontroll, støtte for nullretur, absolutt/relativ posisjonering, JOG og andre funksjoner, kan styres direkte ved hjelp av en berøringsskjerm eller en kontroller med en RS485 grensesnitt.
1.Egenskaper
● Støttar standard Modbus RTU-protokoll på RS485-bus;
● Ingen tap av trinn, presis posisjonering
● Størrelsen på straumen kan justerast etter belastinga for å tilpasse seg ulike mekaniske belastningstilstandar.
● Inbyggd akselerasjon, fortrenging og gløydingsfilter for å få eit jevnt betjeningsevne
● Brukardefinerte segment
● Støttar posisjon, fart, null tilbaketrekking, JOG, flerfases posisjon, flerfases fart og andre moduser;
● 7 inngangsportar, 3 utgangsportfunksjonar som alle er programmerbare og konfigurerbare
● Spenningsområde: DC + 24V ~ 48V;
● Med overstrøms, overspenning, standertolerans og andre beskyttelser
2. Typisk applikasjon
Passar for ulike små og mellomstore automatiseringsutstyr og instrument, som industrirobotar, tekstilmaskineri, spesielle industrisømynster, trådeskrekkingsmaskinar, merkingmaskinar, skjermaskinar, laserfototypesetting, plottorar, CNC-maskinverktøy, graveringsmaskin
3.Elektriske indikatorar
Strømforsyning |
DC24~48V, tilrådande strømforsyning DC36V |
Utgangsstrøm |
Topp 6.0A (strømendringer med belastning) |
DI-inngangsstrøm |
10~50mA |
DI inngangsspenning |
+24VDC |
Meldingart |
RS485 |
Maksimal kommunikasjonshastighet |
115200bps |
4. Miljøparameter
Kjølemetode |
Naturleg kjøling eller ytre radiator |
|
Bruksmiljø |
Bruk høve |
Prøv å unngå støv, olje og korosjon |
Temperatur |
0~40℃ |
|
Fuktighet |
40 til 90% RH |
|
Vibrasjon |
5,9m/s2Max |
|
Lagrings temperatur |
-20℃~80℃ |
|
5. Strøminngangsport
Terminalnummer |
Symbol |
Navn |
Illustrer |
1 |
+Vdc |
Positivt endepunkt for likstrøm |
DC+24V~48V Rekommendert DC+36V strømforsyning |
2 |
GND |
DC-kraft på jord |
6. Motorport
Pin |
Symbol |
Beskrivelse |
1 |
A+ |
En fasemotorvikling + |
2 |
A- |
En fasemotorvikling- |
3 |
B+ |
B fase motorvikling + |
4 |
B- |
B-fase motorvikling - |
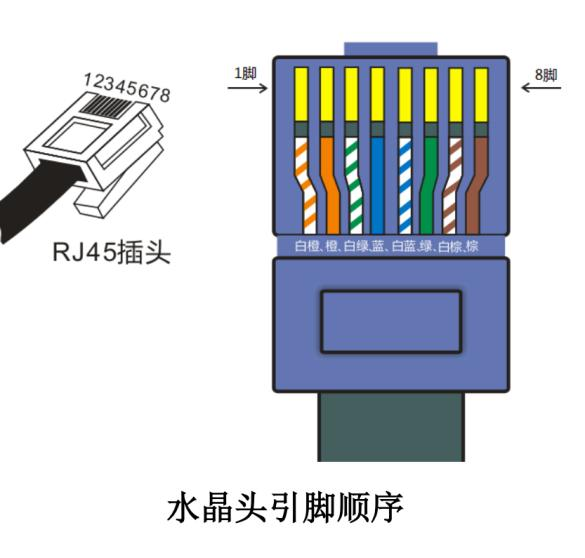
7.RS485 kommunikasjonsport
Pin |
Signaldefinisjon |
Farge på nettverkskabel |
1 |
RS485+ |
hvit og oransje |
2 |
RS485- |
vrang |
3 |
NC: |
hvit og grønn |
4 |
NC: |
blå |
5 |
GND |
hvit og blå |
6 |
GND |
grønn |
7 |
NC: |
hvit og brun |
8 |
NC: |
brun |
8.Enkoderport
Pin |
Definisjon |
Illustrer |
1 |
SKJOLD |
Enkoder skjold |
2 |
NC: |
RS485- |
3 |
NC: |
|
4 |
NC: |
|
5 |
EVCC |
Enkoder strømforsyning positiv terminal |
6 |
EGND |
Enkoder strømforsyning negativ terminal |
7 |
NC: |
|
8 |
NC: |
|
9 |
EB+ |
|
10 |
EB- |
|
11 |
EA+ |
|
12 |
EA- |
|
9.DI/DO-port
Terminalnummer |
Symboldefinisjon |
Illustrer |
1 |
DI0 |
Ein-endingsinngangsport: gyldig arbeidspensjon 24V |
2 |
DI1 |
|
3 |
DI2 |
|
4 |
DI3 |
|
5 |
DI4 |
|
6 |
DI5 |
|
7 |
DI6 |
|
8 |
DICOM |
Inngangsport fellesport: kompatibel med felles anode- og felles katodeforbindingsmetode |
9 |
DO0 |
Utgangsport med én ende |
10 |
DO1 |
|
11 |
DO2 |
|
12 |
DOCOM |
Utgangsport fellesport: negativt pol av strømforsyning |
10.Statusindikasjon
PWR: Strømindikator. Når strømmen er på, er den grønne indikatorlampen alltid på.
AlM: feilindikator. Det raude lyset blinker éin gong i løpet av 3 sekund, over strøm- eller fase-til-fase kortslutning; Det raude lyset blinker 2 gonger kontinuerleg i løpet av 3 sekund, over spenningssvik; Det raude lyset blinker 7 gonger kontinuerleg i løpet av 3 sekund, posisjonshemming overskrider
11.DIP-bryterinnstilling
CL57R brukar ein 5-sifrar DIP-brytar for å stilla inn nummeret på førarstasjonen og ein 2-sifrar DIP-brytar for å stille inn kommunikasjons baudfrekvensen.
SW1~SW5: Stasjonnummeret til føraren. SW6~SW7: Baudfrekvens for kommunikasjon mellom føraren. Slavenummeret og kommunikasjons-baudfrekvensen må settast på nytt for å trekka i kraft etter at dei er endra.
Slave-stasjonnummer |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
Standard |
På |
På |
På |
På |
På |
1 |
Av |
På |
På |
På |
På |
2 |
På |
Av |
På |
På |
På |
3 |
Av |
Av |
På |
På |
På |
4 |
På |
På |
Av |
På |
På |
5 |
Av |
På |
Av |
På |
På |
6 |
På |
Av |
Av |
På |
På |
7 |
Av |
Av |
Av |
På |
På |
8 |
På |
På |
På |
Av |
På |
9 |
Av |
På |
På |
Av |
På |
10 |
På |
Av |
På |
Av |
På |
11 |
Av |
Av |
På |
Av |
På |
12 |
På |
På |
Av |
Av |
På |
13 |
Av |
På |
Av |
Av |
På |
14 |
På |
Av |
Av |
Av |
På |
15 |
Av |
Av |
Av |
Av |
På |
16 |
På |
På |
På |
På |
Av |
17 |
Av |
På |
På |
På |
Av |
18 |
På |
Av |
På |
På |
Av |
19 |
Av |
Av |
På |
På |
Av |
20 |
På |
På |
Av |
På |
Av |
21 |
Av |
På |
Av |
På |
Av |
22 |
På |
Av |
Av |
På |
Av |
23 |
Av |
Av |
Av |
På |
Av |
24 |
På |
På |
På |
Av |
Av |
25 |
Av |
På |
På |
Av |
Av |
26 |
På |
Av |
På |
Av |
Av |
27 |
Av |
Av |
På |
Av |
Av |
28 |
På |
På |
Av |
Av |
Av |
29 |
Av |
På |
Av |
Av |
Av |
30 |
På |
Av |
Av |
Av |
Av |
31 |
Av |
Av |
Av |
Av |
Av |
Merk: Når du angir slavestasjonsnummeret i standardfilen, kan du definere slavestasjonsnummeret ved å sette den tilpassede driverens slavestasjon av nummerregister (0x0020), fra 1 til 31.
Kommunikasjon baudrate |
SW6 |
SW7 |
9600 |
På |
På |
19200 |
Av |
På |
38400 |
På |
Av |
115200 |
Av |
Av |
Merknad: Når kommunikasjonsbaudfrekvensen er sett til 9600bp s, er datamålet til seriell port fastsett til 8 databitter, ingen paritet og 1 stoppbit. Når dei andre tre baudfrekvensane er sett, vert dataformatet for serieport bestemd av dataformatregistret for serieport (0x0021).
SW8: RS485 terminalmotstand. Sjåføren på slutten av bussen må sette denne DIP-bryteren til PÅ, og de andre sjåførene til AV.
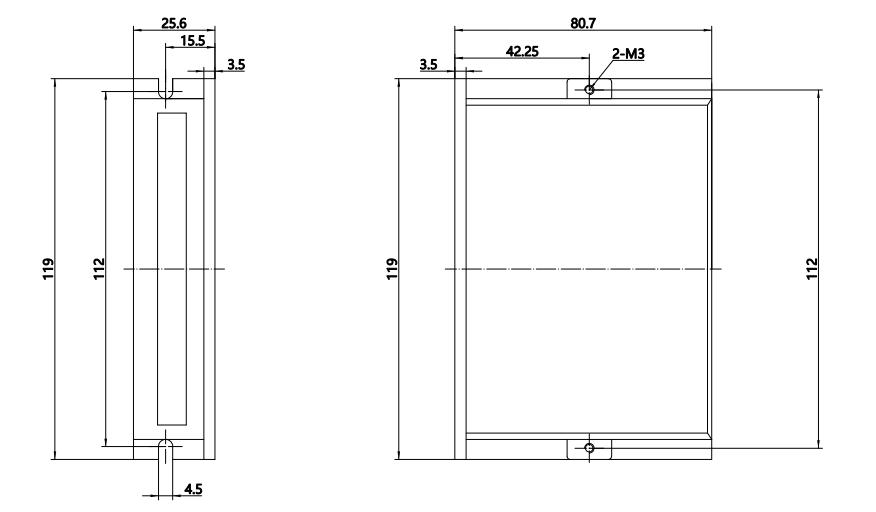
12. Overordnede dimensjoner(enhet=mm)
13.Tilpasset Tjeneste
Vi tilbyr en rekke med tilpasningsmuligheter i designet, som for eksempel type utgangsakse, koblinger, bremser, encoder og redusjonsgearer etc. Brukere kan velge fleksibelt etter faktiske behov. Det er også mulig å designe og produsere etter spesialtilpassede forespørsler.
14.Valgmuligheter
Ledninger |
Flansje |
Åkse |
Skrue |
|
|
|
|
Enkoder |
Brems |
Gearkasse |
Og Mer |
|
|
|
+ |
15.Sertifikat
Vi har gjennomgått ISO-9001-kvalitetssertifiseringssystemet og oppnådd flere brukspatenter. Varene våre har internasjonale sertifikater som CE og ROHS.

16.Gjennomgang

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Alle rettigheter forbeholdt. - Personvernpolicy










