

Domača stran > Izdelki > integrirani Korakni Servo Motorji > RS485 Integrirani stopni servomotori

Naš JSS57R je integriran hibridni servomotor, ki temelji na RS485 avtobusu in podpira protokol Modbus RTU. Ta izdelek vključuje hibridni servomotor in voznik ter uporablja standardni komunikacijski protokol Modbus RTU za upravljanje. V primerjavi s tradicionalno kombinacijo korakih motorjev in korakih motorjev je stroškovna učinkovitost višja. Ta integrirani hibridni servo proizvod vključuje prednosti upravljanja komunikacije z avtobusom, preprosto ožičenje, brez izgubljenih korakov, nizek porast temperature, nizek hrup, visoka hitrost, visok navor in nizki stroški. To je zelo stroškovno učinkovit izdelek za nadzor gibanja.
1.Označilnosti
2.Električne specifikacije
Model NO. |
Kot koraka |
Dolžina motorja |
Trenutna /Phase |
Odpornost /Phase |
Induktivnost /Phase |
Vremeninski moment |
(°) |
(L) mm |
A |
oh |
mH |
N.m |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Električni kazalniki
Napajanje |
DC24~48V, priporočljivo napajanje DC36V |
Izhodni tok |
Vrh 6.0A (tok se spreminja glede na obremenitev) |
Logika vhodnega toka |
7 ~ 16 mA, priporočljivo 10 mA |
Vrsta sporočila |
RS485 |
največja stopnja komunikacije |
115200bps |
Napajanje |
DC24~48V, priporočljivo napajanje DC36V |
5.Območje uporabe in parametri
Metoda hlađenja |
Naravni hlajenje ali zunanji radiator |
|
Okolje uporabe |
Uporabite priložnosti |
Izogibajte se prahu, olju in korozivnim plinom kolikor je mogoče |
Temperatura |
0~40℃ |
|
Vlažnost |
40 ~ 90% RH |
|
Vibracije |
5,9 m/s2Max |
|
Temperatura shranjevanja |
-20℃~80℃ |
|
6.Opisi vmesnika
(1)Vhodni vhodni vhod
Številka terminala |
Simbolik |
Ime in priimek |
Na primer: |
1 |
+Vdc |
Posebni terminal enakega napajanja |
DC+24V~48V Priporočena napajalna enota DC+36V |
2 |
GND |
Zemeljska napajanje s enosmernim pogonom |
(2)Vhod za nadzor signala
Številka terminala |
Simbolik |
Ime in priimek |
Na primer: |
1 |
CCW+ |
Pozitivna meja |
Podpora +5V~+24V |
2 |
CCW- |
Pozitivna meja negativna |
|
3 |
HOME+ |
Mehansko izhodišče je pozitivno. |
|
4 |
Domov. |
Negativni mehanski izvor |
|
5 |
CW+ |
Negativna meja pozitivna |
|
6 |
CW- |
Negativna meja negativna |
|
7 |
PEND+ |
Izhodni pozitivni signal v položaju |
|
8 |
-Predlagam... |
Izhodni negativni signal v položaju |
|
9 |
ALM+ |
Alarm se oddaja. |
|
10 |
-Prav. |
Izhodni negativni alarmni signal |
(3) RS485 komunikacijski port
Številka terminala |
Simbolik |
Ime in priimek |
1 |
RS485+ |
RS485 komunikacijski vmesnik |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4)Označevanje statusa
PWR: Kazalnik moči. Ko je vklopljena, je zelena svetilka vedno prižgana.
-Narednik napake. rdeča luč utripa enkrat v 3 sekundah: napaka prekrvajanja ali kratkega vezja fazno-fazno;
Rdeča luč utripa 7 krat neprekinjeno v 3 sekundah: napaka položaja je izven tolerance alarma.
7.Nastavitev stikala DIP
JSS57R uporablja 6-bitni stikalnik DIP za nastavitev številke pogonske postaje in hitrosti komunikacije.
SW1~SW4: Nastavitev številke pogonske postaje. SW5~SW6: hitrost komunikacije pogona. Ko se spremeni številka sužnjevne postaje in frekvenca komunikacije, se mora ponovno vključiti, da začne veljati.
Številka sužnjev |
SW1 |
SW2 |
SW3 |
SW4 |
privzeto |
Na |
Na |
Na |
Na |
1 |
Izklopljeno |
Na |
Na |
Na |
2 |
Na |
Izklopljeno |
Na |
Na |
3 |
Izklopljeno |
Izklopljeno |
Na |
Na |
4 |
Na |
Na |
Izklopljeno |
Na |
5 |
Izklopljeno |
Na |
Izklopljeno |
Na |
6 |
Na |
Izklopljeno |
Izklopljeno |
Na |
7 |
Izklopljeno |
Izklopljeno |
Izklopljeno |
Na |
8 |
Na |
Na |
Na |
Izklopljeno |
9 |
Izklopljeno |
Na |
Na |
Izklopljeno |
10 |
Na |
Izklopljeno |
Na |
Izklopljeno |
11 |
Izklopljeno |
Izklopljeno |
Na |
Izklopljeno |
12 |
Na |
Na |
Izklopljeno |
Izklopljeno |
13 |
Izklopljeno |
Na |
Izklopljeno |
Izklopljeno |
14 |
Na |
Izklopljeno |
Izklopljeno |
Izklopljeno |
15 |
Izklopljeno |
Izklopljeno |
Izklopljeno |
Izklopljeno |
Opomba: Nastavitev številke sužnjevne postaje, ko je v privzeto datoteko, lahko določi številko sužnjevne postaje z nastavljanjem registrja številke sužnjevne postaje (0x0020), obseg je 1 ~ 31.
Prijemnik |
SW5 |
SW6 |
9600 |
Na |
Na |
19200 |
Izklopljeno |
Na |
38400 |
Na |
Izklopljeno |
115200 |
Izklopljeno |
Izklopljeno |
Opomba: Ko je stopnja komunikacijskega prometa nastavljena na 9600 bps, je serijska podatkovna oblika fiksirana na 8 podatkovnih bitov, brez parnosti in 1 stop bit. Če je nastavljena na druge tri baudne hitrosti, je obliko podatkov serijskega pristanišča določena z registerom oblike podatkov serijskega pristanišča (0x0021).
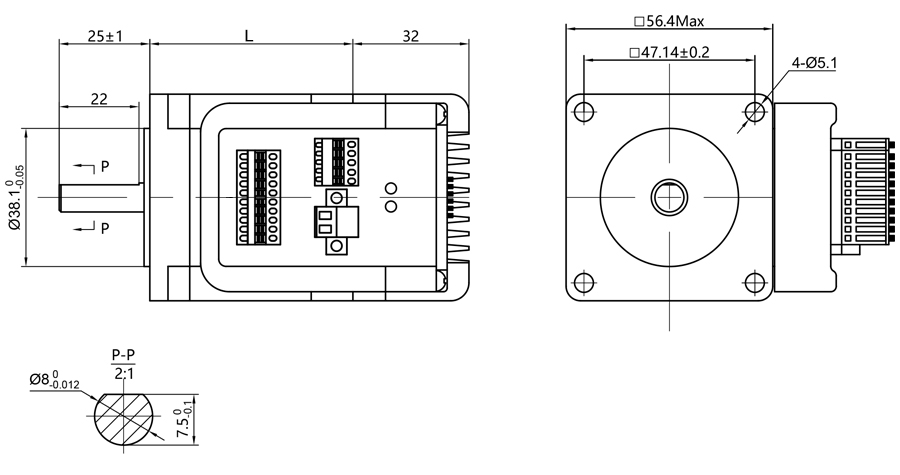
8.Celotne razsežnosti
9.Sertifikat
Presegli smo sistem certifikacije kakovosti ISO-9001 in smo pridobili številne uporabne patentne pravice. Naši izdelki imajo mednarodna potrdila, kot so CE in ROHS.

10.Ogled

Avtorske pravice © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Vse pravice pridržane. - Pravilnik o zasebnosti


