

หน้าแรก > ผลิตภัณฑ์ > มอเตอร์สเต็ปเปอร์แบบลูปปิดและไดรเวอร์ > หมุนรัดขั้นตอนลุ้นปิด

CL57R ของเราเป็นผลิตภัณฑ์ไดรฟ์สเต็ปเปอร์แบบวงปิดที่ใช้ RS485 Modbus ซึ่งรองรับโปรโตคอล Modbus RTU ผลิตภัณฑ์นี้ผสานรวมฟังก์ชันตัวควบคุมแกนเดียวและใช้โปรโตคอลการสื่อสารบัส Modbus RTU มาตรฐานสำหรับการควบคุม สามารถติดตั้งแกนได้สูงสุด 32 แกนและสามารถควบคุมแบบซิงโครนัสของบัสหลายแกนได้ ไดรเวอร์มีการควบคุมตำแหน่ง การควบคุมความเร็ว ตำแหน่งภายใน 16 ส่วน และการควบคุมความเร็วภายใน 16 ส่วน รองรับการคืนค่าเป็นศูนย์ การกำหนดตำแหน่งสัมบูรณ์/สัมพันธ์ JOG และฟังก์ชันอื่นๆ สามารถควบคุมโดยตรงโดยใช้หน้าจอสัมผัสหรือตัวควบคุมที่มีอินเทอร์เฟซ RS485
1.ลักษณะ
● รองรับโปรโตคอล Modbus RTU มาตรฐานบนรถบัส RS485
● ไม่เสียขั้นตอน การตั้งตําแหน่งที่แม่นยํา
● ขนาดของกระแสไฟฟ้าสามารถปรับปรับได้อย่างฉลาดตามภาระภาระ เพื่อปรับตัวให้เข้ากับสภาพภาระภาระทางกลต่างๆ
● การควบคุมกรองเร่ง, ความช้า และการชะลอเพื่อให้การทํางานเรียบร้อยขึ้น
● ภาคที่นิยามโดยผู้ใช้
●รองรับตําแหน่ง ความเร็ว การกลับศูนย์ JOG ตําแหน่งหลายระดับ ความเร็วหลายระดับ และโหมดอื่น ๆ
● 7 ท่าทางเข้า 3 ท่าทางออก ทั้งหมดสามารถโปรแกรมและตั้งค่าได้
● ระยะความแรงกดไฟ: DC + 24V ~ 48V
● มีการป้องกันการกระแสไฟฟ้าเกินแรง และความดันเกินแรง
2.การใช้งานทั่วไป
เหมาะสําหรับอุปกรณ์และเครื่องมืออัตโนมัติขนาดเล็กและกลางหลายชนิด เช่น หุ่นยนต์อุตสาหกรรม เครื่องจักรเย็บอุตสาหกรรมพิเศษ เครื่องจักรตัดสาย เครื่องจักรเครื่องหมาย เครื่องจักรตัด เครื่องจักรเลเซอร์ถ่ายรูป เครื่องพลอตเตอร์ เครื่องมือ CNC เคร
3.ตัวชี้วัดไฟฟ้า
การให้พลังงาน |
DC24~48V แหล่งจ่ายไฟที่แนะนำ DC36V |
กระแสออก |
สูงสุด 6.0A (กระแสเปลี่ยนแปลงตามโหลด) |
กระแสอินพุต DI |
10~50มิลลิแอมป์ |
แรงดันไฟเข้า DI |
+24VDC |
ประเภทการสื่อสาร |
RS485 |
อัตราการสื่อสารสูงสุด |
115200bps |
4.พารามิเตอร์สภาพแวดล้อม
วิธีการระบายความร้อน |
การเย็นธรรมชาติหรือเรดิเอเตอร์ภายนอก |
|
สภาพแวดล้อมการใช้งาน |
ใช้โอกาส |
พยายามหลีกเลี่ยงฝุ่น น้ํามัน และก๊าซที่กัดสนิม |
อุณหภูมิ |
0~40℃ |
|
ความชื้น |
40 ~ 90% RH |
|
การสั่นสะเทือน |
5.9m/s2Max |
|
อุณหภูมิการจัดเก็บ |
-20℃~80℃ |
|
5.พอร์ตอินพุตไฟฟ้า
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
แสดงให้เห็น |
1 |
+Vdc |
ปลายบวกของไฟฟ้าไฟฟ้าแบบ DC |
DC+24V~48V แหล่งไฟฟ้า DC + 36V ที่แนะนํา |
2 |
GND |
แผ่นดินพลังงานแบบ DC |
6.พอร์ตมอเตอร์
พิน |
สัญลักษณ์ |
คำอธิบาย |
1 |
A+ |
ขดลวดมอเตอร์เฟส A + |
2 |
A- |
ขดลวดมอเตอร์เฟสเอ- |
3 |
B+ |
ขดลวดมอเตอร์เฟส B+ |
4 |
B- |
ขดลวดมอเตอร์เฟส B - |
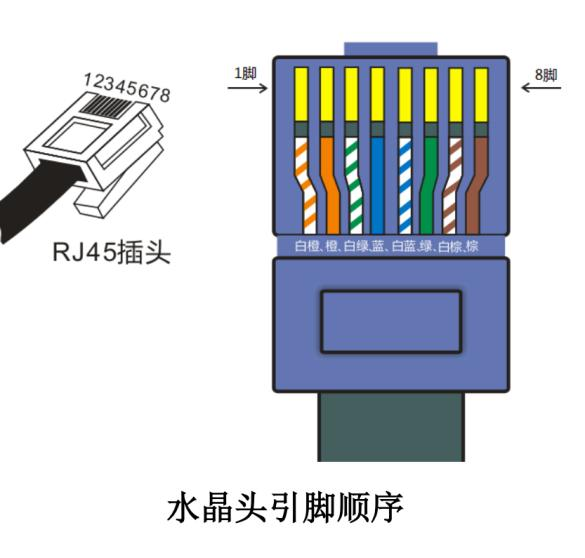
7.พอร์ตสื่อสาร RS485
พิน |
คำจำกัดความของสัญญาณ |
สีสายเคเบิลเครือข่าย |
1 |
RS485+ |
สีขาวและสีส้ม |
2 |
RS485- |
แรงจ์ |
3 |
NC |
สีขาวและสีเขียว |
4 |
NC |
ฟ้า |
5 |
GND |
สีขาวและสีฟ้า |
6 |
GND |
สีเขียว |
7 |
NC |
สีขาวและสีน้ำตาล |
8 |
NC |
น้ำตาล |
8.พอร์ตเอ็นโคเดอร์
พิน |
คํานิยาม |
แสดงให้เห็น |
1 |
การป้องกัน |
โล่เข้ารหัส |
2 |
NC |
RS485- |
3 |
NC |
|
4 |
NC |
|
5 |
อีวีซีซี |
ขั้วบวกของแหล่งจ่ายไฟเอนโคเดอร์ |
6 |
อีเอ็นดี |
ขั้วลบของแหล่งจ่ายไฟตัวเข้ารหัส |
7 |
NC |
|
8 |
NC |
|
9 |
อีบี+ |
|
10 |
อีบี- |
|
11 |
อีเอ+ |
|
12 |
อีเอ- |
|
9.พอร์ต DI/DO
เลขของเทอร์มินัล |
คำจำกัดความของสัญลักษณ์ |
แสดงให้เห็น |
1 |
ฉันคือ0 |
สายเข้าแบบเดียว: ความแรงงานที่ใช้ได้ 24V |
2 |
ดีไอ1 |
|
3 |
ดีไอ2 |
|
4 |
ดีไอ3 |
|
5 |
ดีไอ 4 |
|
6 |
ดีไอ5 |
|
7 |
DI6 |
|
8 |
ดีคอม |
Port input common port: รองรับกับวิธีการเชื่อมต่อ anode และ cathode ที่เหมือนกัน |
9 |
ทำสิ |
พอร์ตเอาท์พุตแบบปลายเดียว |
10 |
ดีโอ1 |
|
11 |
ดีโอ2 |
|
12 |
ดีโอคอม |
สายออก สายออกทั่วไป: ต้นลบของเครื่องไฟฟ้า |
10.การแจ้งสถานะ
PWR: ไฟแสดงสถานะพลังงาน เมื่อเปิดเครื่อง ไฟแสดงสถานะสีเขียวจะสว่างตลอดเวลา
ALM: ตัวแสดงความผิดพลาด ไฟแดงส่องส่องครั้งเดียวภายใน 3 วินาที, มากกว่าปัจจุบันหรือช่วงต่อช่วงการตัดสายสั้น; ไฟแดงส่องส่องส่อง 2 ครั้งต่อเนื่องภายใน 3 วินาที, มากกว่าความผิดปกติของแรงดัน; ไฟแดงส่องส่อง 7 ครั้งต่อเน
11.การตั้งค่าสวิตช์ DIP
CL57R ใช้สวิทช์ DIP 5 หลักในการตั้งหมายเลขสถานีขับรถ และสวิทช์ DIP 2 หลักในการตั้งอัตราการสื่อสาร
SW1 ~ SW5: การตั้งค่าหมายเลขสถานีคนขับ SW6 ~ SW7: อัตราการสื่อสารของพนักงานขับ จํานวนสถานีทาสและอัตราการสื่อสารของบอดต้องเปิดใหม่ เพื่อให้มีผลหลังจากที่มีการปรับปรุง
เลขสถานีทาส |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
ค่าเริ่มต้น |
บน |
บน |
บน |
บน |
บน |
1 |
ส่ง |
บน |
บน |
บน |
บน |
2 |
บน |
ส่ง |
บน |
บน |
บน |
3 |
ส่ง |
ส่ง |
บน |
บน |
บน |
4 |
บน |
บน |
ส่ง |
บน |
บน |
5 |
ส่ง |
บน |
ส่ง |
บน |
บน |
6 |
บน |
ส่ง |
ส่ง |
บน |
บน |
7 |
ส่ง |
ส่ง |
ส่ง |
บน |
บน |
8 |
บน |
บน |
บน |
ส่ง |
บน |
9 |
ส่ง |
บน |
บน |
ส่ง |
บน |
10 |
บน |
ส่ง |
บน |
ส่ง |
บน |
11 |
ส่ง |
ส่ง |
บน |
ส่ง |
บน |
12 |
บน |
บน |
ส่ง |
ส่ง |
บน |
13 |
ส่ง |
บน |
ส่ง |
ส่ง |
บน |
14 |
บน |
ส่ง |
ส่ง |
ส่ง |
บน |
15 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
บน |
16 |
บน |
บน |
บน |
บน |
ส่ง |
17 |
ส่ง |
บน |
บน |
บน |
ส่ง |
18 |
บน |
ส่ง |
บน |
บน |
ส่ง |
19 |
ส่ง |
ส่ง |
บน |
บน |
ส่ง |
20 |
บน |
บน |
ส่ง |
บน |
ส่ง |
21 |
ส่ง |
บน |
ส่ง |
บน |
ส่ง |
22 |
บน |
ส่ง |
ส่ง |
บน |
ส่ง |
23 |
ส่ง |
ส่ง |
ส่ง |
บน |
ส่ง |
24 |
บน |
บน |
บน |
ส่ง |
ส่ง |
25 |
ส่ง |
บน |
บน |
ส่ง |
ส่ง |
26 |
บน |
ส่ง |
บน |
ส่ง |
ส่ง |
27 |
ส่ง |
ส่ง |
บน |
ส่ง |
ส่ง |
28 |
บน |
บน |
ส่ง |
ส่ง |
ส่ง |
29 |
ส่ง |
บน |
ส่ง |
ส่ง |
ส่ง |
30 |
บน |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
31 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
หมายเหตุ: เมื่อตั้งค่าหมายเลขสถานีสเลฟในไฟล์เริ่มต้น คุณสามารถกำหนดหมายเลขสถานีสเลฟได้โดยตั้งค่ารีจิสเตอร์หมายเลขปิดสถานีสเลฟไดรเวอร์แบบกำหนดเอง (0x0020) ตั้งแต่ 1 ถึง 31
อัตราบอดเรทการสื่อสาร |
SW6 |
SW7 |
9600 |
บน |
บน |
19200 |
ส่ง |
บน |
38400 |
บน |
ส่ง |
115200 |
ส่ง |
ส่ง |
หมายเหตุ: เมื่ออัตราการสื่อสารบอดถูกตั้งเป็น 9600bp s การจัดรูปแบบข้อมูลทางช่อง serial port ได้ถูกกําหนดเป็น 8 บิตข้อมูล ไม่มี parity และ 1 บิตหยุด เมื่อตั้งให้เป็นอัตรา baud อีกสามอัตรา การจัดรูปแบบข้อมูลบอร์ดลําดับถูกกําหนดโดยบันทึกรูปแบบข้อมูลบอร์ดลําดับ (0x0021).
SW8: ตัวต้านทานขั้วต่อ RS485 ไดรเวอร์ที่ปลายบัสต้องตั้งสวิตช์ DIP นี้เป็นเปิด และไดรเวอร์อื่นเป็นปิด
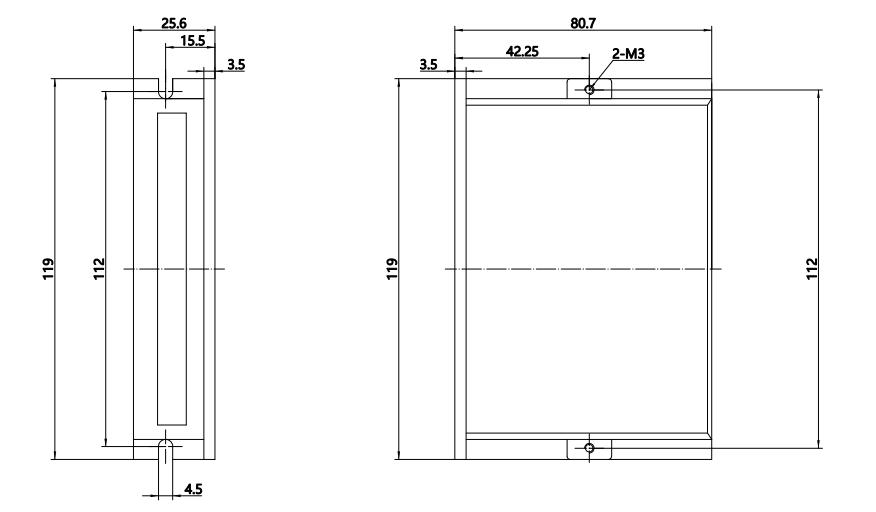
12.ขนาดโดยรวม (หน่วย = มม.)
13.บริการที่กำหนดเอง
เราให้บริการตัวเลือกในการปรับแต่งหลากหลายในด้านการออกแบบ เช่น ประเภทแกนขับออก ตัวเชื่อมต่อ เบรค เอนコーダ และเกียร์ เป็นต้น ผู้ใช้สามารถเลือกได้อย่างยืดหยุ่นตามความต้องการจริง นอกจากนี้ยังสามารถออกแบบและผลิตตามคำขอพิเศษเฉพาะได้อีกด้วย
ตัวเลือก 14
สายไฟ |
แหวนยึด |
ด้ามจับ |
สกรู |
|
|
|
|
ตัวเข้ารหัส |
เบรก |
เกียร์บ็อกซ์ |
และอื่นๆ อีกมากมาย |
|
|
|
+ |
ใบรับรอง 15
เราได้ผ่านระบบการรับรองคุณภาพ ISO-9001 และได้รับสิทธิบัตรการใช้งานจำนวนหนึ่ง ผลิตภัณฑ์ของเราได้รับการรับรองระดับนานาชาติ เช่น CE และ ROHS

บทวิจารณ์ 16

ลิขสิทธิ์ © 2026 บริษัทฉางโจวจินซานซือเม่ย์จีอีเล็คโทรนิคส์ จำกัด ทั้งหมดสงวนสิทธิ์ - นโยบายความเป็นส่วนตัว










