หน้าแรก > ผลิตภัณฑ์ > ระบบเซอร์โว > เครื่องยนต์เซอร์โวซี (DC) ที่บูรณาการ

JSV57 มอเตอร์เซอร์โวอินเทกรีตเป็นมอเตอร์ DC ขนาด 57 มม. มอเตอร์เซอร์โว DC นี้นําชิป ARM 32 บิต และเทคโนโลยีอัลการิทึมควบคุมที่ปรับปรุงให้ดีที่สุด, ด้วยการออกแบบที่ดีเยี่ยมและขนาดเล็ก การออกแบบแบบที่บูรณาการของคนขับและมอเตอร์ ไม่เพียงแต่ช่วยรักษาการเชื่อมต่อระหว่างคนขับและมอเตอร์ แต่ยังลดการขัดแย้งทางไฟฟ้าแม่เหล็กระหว่างการเชื่อมต่อได้อย่างมีประสิทธิภาพ มันใช้เทคโนโลยีป้องกันการสั่นสะเทือนที่ดีกว่าและการผลิตความร้อนต่ํา เพื่อแก้ปัญหาของการผลิตความร้อนและเสียงดังได้อย่างมีประสิทธิภาพ
1.ลักษณะ
2.การใช้งานทั่วไป
เหมาะสำหรับอุปกรณ์และเครื่องมืออัตโนมัติต่าง ๆ ขนาดเล็กถึงกลาง เช่น เครื่องพิมพ์หมึก젯 เครื่องแกะสลักขนาดเล็กถึงกลาง อุปกรณ์ประมวลผลอิเล็กทรอนิกส์ อุปกรณ์จับอัตโนมัติ เครื่องจักร CNC พิเศษ เครื่องบรรจุ เป็นต้น โดยมีประสิทธิภาพอย่างมากในอุปกรณ์ที่ผู้ใช้คาดหวังให้มีเสียงรบกวนต่ำและมีความเร็วสูง
3.ตัวชี้วัดไฟฟ้า
พารามิเตอร์ |
JSV57 |
|||
น้อยที่สุด |
ค่าปกติ |
มากที่สุด |
หน่วย |
|
กระแสไฟฟ้าขาออกต่อเนื่อง |
0 |
- |
6 |
A |
แรงดันไฟฟ้าแหล่งจ่ายขาเข้า |
24 |
36 |
48 |
วีดีซี |
กระแสปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับป |
7 |
10 |
16 |
แม่ |
แรงดันไฟฟ้าขาเข้าลอจิก |
5 |
5 |
24 |
V |
ความถี่ของกระแทก |
0 |
- |
200 |
kHz |
ความต้านทานในการกันความร้อน |
100 |
|
|
MΩ |
4.ข้อมูลทางไฟฟ้า
หน่วย |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
เฟส |
|
3 |
||
เสา |
|
8 |
||
โลต |
|
36vdc |
||
กำลังไฟฟ้าที่กำหนด |
W |
90 |
140 |
180 |
แรงบิดที่กำหนด |
น.ม. |
0.28 |
0.45 |
0.57 |
แรงบิดสูงสุด |
น.ม. |
0.8 |
1.1 |
1.5 |
ความเร็วที่กำหนด |
รอบต่อนาที |
3000 |
3000 |
3000 |
กระแสที่กำหนด |
A |
3.3 |
5 |
6.6 |
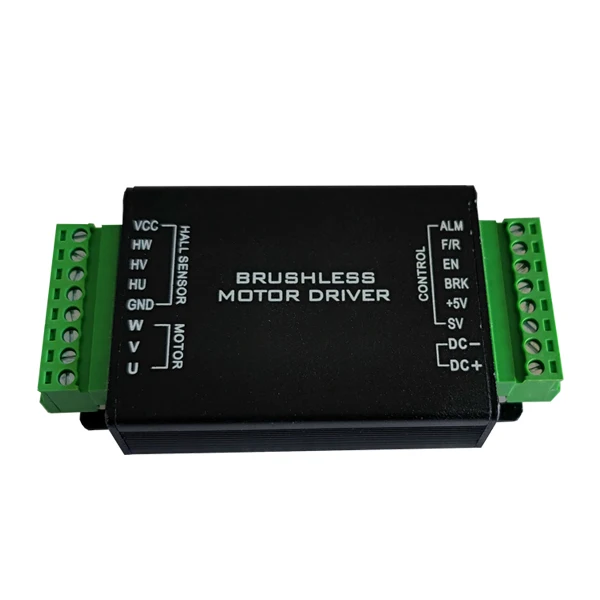
5.การแนะนำอินเทอร์เฟซและการเชื่อมต่อสายขับเคลื่อน
(1) สายเข้าพลังงาน
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
แสดงให้เห็น |
1 |
+Vdc |
ปลายบวกของพลังงานแบบ DC |
DC+24V~48V |
2 |
GND |
แผ่นดินพลังงานแบบ DC |
0V |
(2) การควบคุมสัญญาณ
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
แสดงให้เห็น |
1 |
PUL + |
อินพุทพัลส์ + |
รองรับสัญญาณ 5V~24V |
2 |
PUL - |
การป้อนพัลส์ - |
|
3 |
DIR + |
การป้อนทิศทาง + |
|
4 |
DIR - |
การป้อนทิศทาง - |
|
5 |
ENA + |
เปิดใช้งานการป้อนข้อมูล + |
|
6 |
ENA - |
เปิดใช้งานการป้อนข้อมูล - |
|
7 |
PED + |
ตำแหน่งสัญญาณเอาท์พุต + |
|
8 |
PED - |
ตำแหน่งสัญญาณเอาท์พุต - |
|
9 |
ALM + |
สัญญาณเตือนภัยเอาท์พุต + |
|
10 |
ALM - |
สัญญาณเอาท์พุตสัญญาณเตือน – |
(3) RS232 สายการสื่อสาร
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
แสดงให้เห็น |
1 |
NC |
|
|
2 |
RX |
เครื่องรับ RS232 |
|
3 |
GND |
แอร์เวย์ |
|
4 |
TX |
ผู้ส่ง RS232 |
|
5 |
+5V |
ปลายพลังงานบวก |
(สิ่งนี้ไม่จำเป็นต้องเชื่อมต่อ) |
(4) การระบุสถานะ
PWR: ตัวชี้วัดพลังงาน เมื่อได้รับพลังงาน ตัวชี้วัดสีเขียวจะสว่างขึ้น
ALM: ตัวชี้วัดข้อผิดพลาด เมื่อเกิดข้อผิดพลาด ตัวชี้วัดจะกระพริบในรอบ 5 วินาที เมื่อผู้ใช้แก้ไขข้อผิดพลาดแล้ว หลอด LED สีแดงจะปิดตลอดเวลา หลอด LED สีแดงจะกระพริบด้วยความถี่ 2Hz โดยที่ LED จะติด 200ms และดับ 300ms จำนวนครั้งที่หลอด LED สีแดงกระพริบใน 5 วินาทีแสดงถึงข้อมูลข้อผิดพลาดที่แตกต่างกัน และความสัมพันธ์เฉพาะเจาะจงแสดงอยู่ในตารางดังนี้:
เลขลําดับ |
จำนวนการกระพริบ |
คำอธิบายข้อผิดพลาด |
1 |
1 |
ข้อผิดพลาดกระแสเกิน |
2 |
2 |
ข้อผิดพลาดความคลาดเคลื่อนตำแหน่ง |
3 |
3 |
ข้อผิดพลาดของเอนコーダ |
4 |
4 |
มอเตอร์ล้นโหลด |
5 |
5 |
แรงดันสูงเกินบนบัส |
6 |
6 |
แรงดันต่ำเกินบนบัส |
6.การตั้งค่าสวิตช์ DIP
7.การกรองคำสั่งอินพุต
เมื่อสวิตช์ DIP S1 ตั้งค่าเป็น ON ฟังก์ชันการกรองอินพุตจะถูกเปิดใช้งาน และเวลาในการกรองจะถูกกำหนดโดยรีจิสเตอร์ 2603; ฟังก์ชันนี้ทำงานได้เฉพาะเมื่อมอเตอร์ไม่ถูกล็อก;
ไดรเวอร์ JSV57 ใช้สวิตช์ DIP หกตำแหน่งเพื่อกำหนดความแม่นยำของ subdivision และทิศทางการหมุนของมอเตอร์
(1)การตั้งค่าทิศทาง
ทิศทาง |
S2 |
CCW |
ส่ง |
CW |
บน |
(2)การตั้งค่า Microstep
อัมพวาส/REV |
S3 |
S4 |
S5 |
S6 |
ค่าเริ่มต้น |
บน |
บน |
บน |
บน |
400 |
บน |
บน |
บน |
บน |
800 |
ส่ง |
บน |
บน |
บน |
1600 |
บน |
ส่ง |
บน |
บน |
3200 |
ส่ง |
ส่ง |
บน |
บน |
6400 |
บน |
บน |
ส่ง |
บน |
12800 |
ส่ง |
บน |
ส่ง |
บน |
25600 |
บน |
ส่ง |
ส่ง |
บน |
51200 |
ส่ง |
ส่ง |
ส่ง |
บน |
1000 |
บน |
บน |
บน |
ส่ง |
2000 |
ส่ง |
บน |
บน |
ส่ง |
4000 |
บน |
ส่ง |
บน |
ส่ง |
5000 |
ส่ง |
ส่ง |
บน |
ส่ง |
8000 |
บน |
บน |
ส่ง |
ส่ง |
10000 |
ส่ง |
บน |
ส่ง |
ส่ง |
20000 |
บน |
ส่ง |
ส่ง |
ส่ง |
40000 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
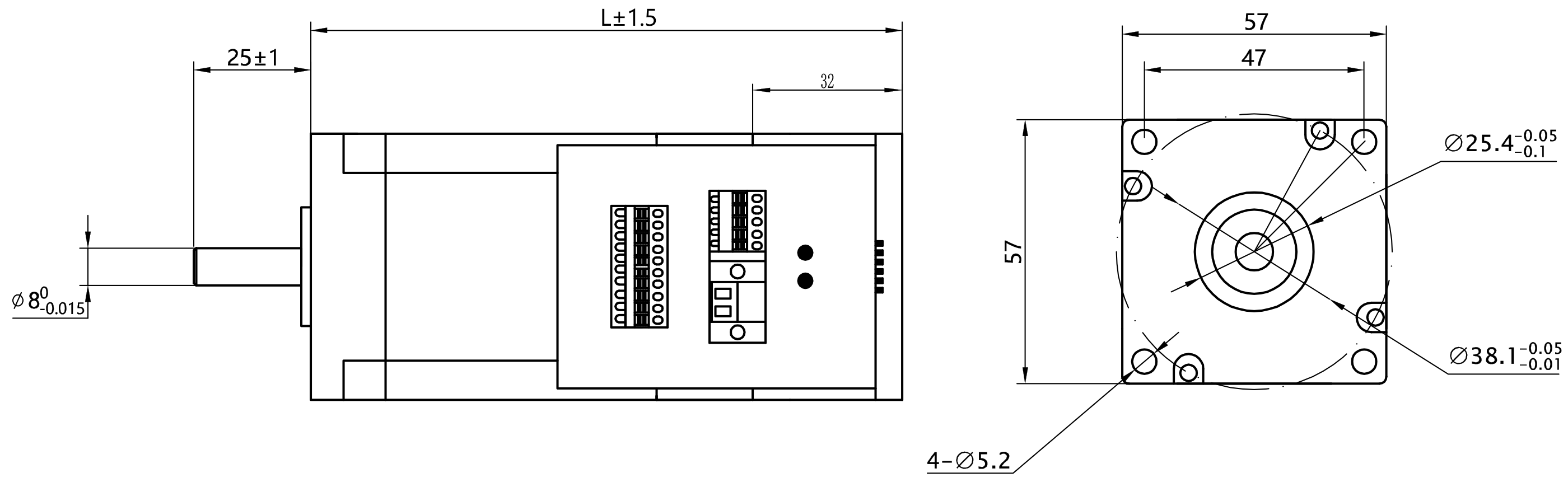
8.มิติของมอเตอร์(หน่วย=มม.)
9.ใบรับรอง
เราได้ผ่านระบบการรับรองคุณภาพ ISO-9001 และได้รับสิทธิบัตรการใช้งานจำนวนหนึ่ง ผลิตภัณฑ์ของเราได้รับการรับรองระดับนานาชาติ เช่น CE และ ROHS

10.รีวิว

ลิขสิทธิ์ © 2026 บริษัทฉางโจวจินซานซือเม่ย์จีอีเล็คโทรนิคส์ จำกัด ทั้งหมดสงวนสิทธิ์ - นโยบายความเป็นส่วนตัว