

หน้าแรก > ผลิตภัณฑ์ > มอเตอร์สเต็ปเปอร์แบบลูปปิดและไดรเวอร์ > หมุนรัดขั้นตอนลุ้นปิด

CL86R เป็นผลิตภัณฑ์ไดรเวอร์สเต็ปแบบวงปิดที่ใช้โปรโตคอล Modbus RTU ของบัส RS485 ผลิตภัณฑ์นี้ผสานรวมฟังก์ชันของตัวควบคุมแกนเดี่ยว โปรโตคอลการสื่อสารบัส Modbus RTU มาตรฐาน แกนยึดสูงสุด 32 แกน การควบคุมแบบซิงโครนัสของบัสหลายแกน ไดรฟ์พร้อมการควบคุมตำแหน่ง การควบคุมความเร็ว ตำแหน่งภายใน และการควบคุมความเร็วภายใน 16 ระดับ รองรับการกำหนดตำแหน่งศูนย์ ตำแหน่งสัมบูรณ์/สัมพันธ์ JOG สามารถใช้หน้าจอสัมผัสหรือตัวควบคุมกับการควบคุมอินเทอร์เฟซ RS485 ได้โดยตรง
1.ลักษณะ
● รองรับโปรโตคอล Modbus RTU มาตรฐานบนบัส RS485;
● ไม่สูญเสียขั้นตอน, การจัดตำแหน่งที่แม่นยำ;
● กระแสไฟฟ้าถูกปรับตามโหลดเพื่อให้เหมาะกับสภาพโหลดทางกลต่างๆ;
● การเร่งความเร็วและลดความเร็วในตัวและการควบคุมการกรองที่ราบรื่น ช่วยให้การทำงานราบรื่นยิ่งขึ้น
● คะแนนละเอียดที่ผู้ใช้กำหนด
● รองรับตำแหน่ง ความเร็ว การกลับสู่ศูนย์ JOG หลายตำแหน่ง หลายความเร็ว และโหมดอื่นๆ
● พอร์ตอินพุต 7 พอร์ต พอร์ตเอาท์พุต 3 พอร์ต สามารถตั้งค่าโปรแกรมการทำงานได้
● ช่วงแรงดันไฟฟ้า: AC20V~80V;
● มีการป้องกันกระแสเกิน แรงดันเกิน ตำแหน่งต่างกันเกิน และการป้องกันอื่นๆ
2.การใช้งานทั่วไป
เหมาะสําหรับอุปกรณ์และเครื่องมืออัตโนมัติขนาดเล็กและกลางหลายชนิด เช่น หุ่นยนต์อุตสาหกรรม เครื่องจักรเย็บอุตสาหกรรมพิเศษ เครื่องจักรตัดสาย เครื่องจักรเครื่องหมาย เครื่องจักรตัด เครื่องจักรเลเซอร์ถ่ายรูป เครื่องพลอตเตอร์ เครื่องมือ CNC เคร
3.ตัวชี้วัดไฟฟ้า
แรงดันไฟฟ้าจ่าย |
AC 20~80V |
ผลิต |
ค่าสูงสุด 8.0A (กระแสเปลี่ยนแปลงตามโหลด) |
กระแสไฟฟ้าขาเข้า DI |
10~50มิลลิแอมป์ |
แรงดันไฟเข้า DI |
+24VDC |
ประเภทการสื่อสาร |
RS485 |
อัตราการสื่อสารสูงสุด |
115200bp s |
4.พารามิเตอร์สภาพแวดล้อม
วิธีการระบายความร้อน |
การเย็นธรรมชาติหรือเรดิเอเตอร์ภายนอก |
|
สภาพแวดล้อมการใช้งาน |
ใช้โอกาส |
พยายามหลีกเลี่ยงฝุ่น น้ํามัน และก๊าซที่กัดสนิม |
อุณหภูมิ |
0~40℃ |
|
ความชื้น |
40 ~ 90% RH |
|
การสั่นสะเทือน |
5.9m/s2Max |
|
อุณหภูมิการจัดเก็บ |
-20℃~80℃ |
|
5.พอร์ตอินพุตไฟฟ้า
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
อธิบาย |
1 |
AC1 |
AC1 |
ไฟ AC20V ~80V |
2 |
AC2 |
AC2 |
6.พอร์ตมอเตอร์
พิน |
คำจำกัดความของสัญญาณ |
อธิบาย |
1 |
A + |
ขดลวดมอเตอร์ A เป็นเฟสบวก |
2 |
A - |
ขดลวดมอเตอร์ A เป็นเฟสลบ |
3 |
B + |
ขดลวดมอเตอร์ B เป็นเฟสบวก |
4 |
B- |
ขดลวดมอเตอร์ B เป็นเฟสลบ |
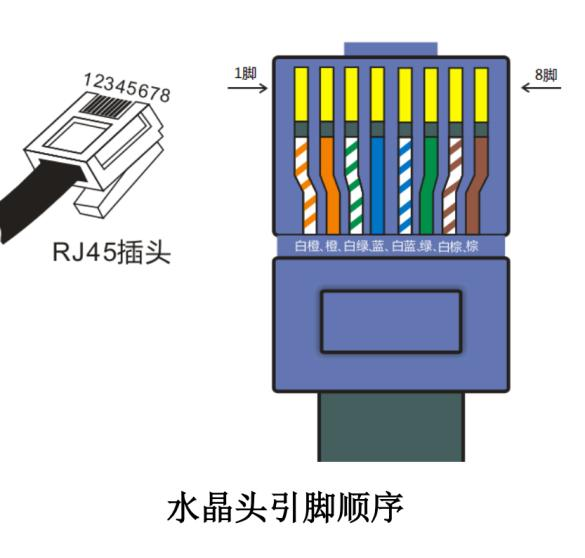
7.พอร์ตสื่อสาร RS485
พิน |
คำจำกัดความของสัญญาณ |
สีสายเคเบิลเครือข่าย |
1 |
RS 485+ |
สีขาวและสีส้ม |
2 |
RS 485- |
ส้ม |
3 |
NC |
สีขาวและสีเขียว |
4 |
NC |
ฟ้า |
5 |
GND |
สีขาวและสีฟ้า |
6 |
GND |
สีเขียว |
7 |
NC |
สีขาวและสีน้ำตาล |
8 |
NC |
น้ำตาล |
8.พอร์ตตัวเข้ารหัส
พิน |
คํานิยาม |
แสดงให้เห็น |
1 |
การป้องกัน |
โล่เข้ารหัส |
2 |
NC |
RS485- |
3 |
NC |
|
4 |
NC |
|
5 |
อีวีซีซี |
แหล่งจ่ายไฟปลายหลักของตัวเข้ารหัส |
6 |
อีเอ็นดี |
แหล่งจ่ายไฟตัวเข้ารหัสปลายลบ |
7 |
NC |
|
8 |
NC |
|
9 |
อีบี+ |
|
10 |
อีบี- |
|
11 |
อีเอ+ |
|
12 |
อีเอ- |
|
9.พอร์ต DI/DO
เลขของเทอร์มินัล |
คำจำกัดความของสัญลักษณ์ |
แสดงให้เห็น |
1 |
ฉันคือ0 |
สายเข้าแบบเดียว: ความแรงงานที่ใช้ได้ 24V |
2 |
ดีไอ1 |
|
3 |
ดีไอ2 |
|
4 |
ดีไอ3 |
|
5 |
ดีไอ 4 |
|
6 |
ดีไอ5 |
|
7 |
DI6 |
|
8 |
ดีคอม |
Port input common port: รองรับกับวิธีการเชื่อมต่อ anode และ cathode ที่เหมือนกัน |
9 |
ทำสิ |
พอร์ตเอาท์พุตแบบปลายเดียว |
10 |
ดีโอ1 |
|
11 |
ดีโอ2 |
|
12 |
ดีโอคอม |
สายออก สายออกทั่วไป: ต้นลบของเครื่องไฟฟ้า |
10.การแจ้งสถานะ
PWR: ไฟแสดงสถานะพลังงาน เมื่อเปิดไฟ, ไฟแสดงสถานะสีเขียวจะติดอยู่เสมอ.
ALM: ไฟแสดงสถานะข้อผิดพลาด ไฟสีแดงกระพริบครั้งเดียวภายใน 3 วินาที: ข้อผิดพลาดกระแสเกินหรือข้อผิดพลาดลัดวงจรระหว่างเฟส; ไฟสีแดงกระพริบ 2 ครั้งภายใน 3 วินาที: ข้อผิดพลาดแรงดันเกิน; ไฟสีแดงกระพริบ 7 ครั้งภายใน 3 วินาที: สัญญาณเตือนข้อผิดพลาดตำแหน่ง.
11.การตั้งค่าสวิตช์ DIP
CL86R ใช้สวิตช์หมุน 5 บิตเพื่อตั้งค่าหมายเลขสถานีไดรฟ์และสวิตช์หมุน 2 บิตเพื่อตั้งค่าอัตราคลื่นการสื่อสาร
SW1-SW5 : กำหนดหมายเลขสถานีไดรฟ์แล้ว SW6 ถึง SW7 : กำหนดค่าบอดเรทการสื่อสารของไดรฟ์ จากหมายเลขสถานี จำเป็นต้องปรับเปลี่ยนอัตราพอร์ตการสื่อสารใหม่อีกครั้ง
จากหมายเลขสถานี |
SW1 |
SW2 |
SW3 |
SW4 |
SW5 |
ค่าเริ่มต้น |
บน |
บน |
บน |
บน |
บน |
1 |
ส่ง |
บน |
บน |
บน |
บน |
2 |
บน |
ส่ง |
บน |
บน |
บน |
3 |
ส่ง |
ส่ง |
บน |
บน |
บน |
4 |
บน |
บน |
ส่ง |
บน |
บน |
5 |
ส่ง |
บน |
ส่ง |
บน |
บน |
6 |
บน |
ส่ง |
ส่ง |
บน |
บน |
7 |
ส่ง |
ส่ง |
ส่ง |
บน |
บน |
8 |
บน |
บน |
บน |
ส่ง |
บน |
9 |
ส่ง |
บน |
บน |
ส่ง |
บน |
10 |
บน |
ส่ง |
บน |
ส่ง |
บน |
11 |
ส่ง |
ส่ง |
บน |
ส่ง |
บน |
12 |
บน |
บน |
ส่ง |
ส่ง |
บน |
13 |
ส่ง |
บน |
ส่ง |
ส่ง |
บน |
14 |
บน |
ส่ง |
ส่ง |
ส่ง |
บน |
15 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
บน |
16 |
บน |
บน |
บน |
บน |
ส่ง |
17 |
ส่ง |
บน |
บน |
บน |
ส่ง |
18 |
บน |
ส่ง |
บน |
บน |
ส่ง |
19 |
ส่ง |
ส่ง |
บน |
บน |
ส่ง |
20 |
บน |
บน |
ส่ง |
บน |
ส่ง |
21 |
ส่ง |
บน |
ส่ง |
บน |
ส่ง |
22 |
บน |
ส่ง |
ส่ง |
บน |
ส่ง |
23 |
ส่ง |
ส่ง |
ส่ง |
บน |
ส่ง |
24 |
บน |
บน |
บน |
ส่ง |
ส่ง |
25 |
ส่ง |
บน |
บน |
ส่ง |
ส่ง |
26 |
บน |
ส่ง |
บน |
ส่ง |
ส่ง |
27 |
ส่ง |
ส่ง |
บน |
ส่ง |
ส่ง |
28 |
บน |
บน |
ส่ง |
ส่ง |
ส่ง |
29 |
ส่ง |
บน |
ส่ง |
ส่ง |
ส่ง |
30 |
บน |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
31 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
หมายเหตุ: การตั้งค่าหมายเลขทาส, เมื่ออยู่ในค่าเริ่มต้น, สามารถกำหนดได้โดยการตั้งค่าลงทะเบียนทาสที่กำหนดเอง (0x0020) จาก 1 ถึง 31.
อัตราพนักงานสื่อสาร |
SW6 |
SW7 |
9600 |
บน |
บน |
19200 |
ส่ง |
บน |
38400 |
บน |
ส่ง |
115200 |
ส่ง |
ส่ง |
หมายเหตุ : เมื่ออัตราการสื่อสารของพอร์ตถูกตั้งค่าเป็น 9600bps รูปแบบข้อมูลพอร์ตอนุกรมจะถูกกำหนดเป็น 8 บิตข้อมูล ไม่มีการตรวจสอบ และ 1 บิตหยุด เมื่อถูกตั้งค่าเป็นอัตราเสียงอื่น ๆ อีกสามอัตรา รูปแบบข้อมูลพอร์ตอนุกรมจะถูกกำหนดโดยรีจิสเตอร์รูปแบบข้อมูลพอร์ตอนุกรม (0x0021).
SW8: ความต้านทานขั้วต่อ RS485 ไดรฟ์ปลายบัสจะต้องตั้งสวิตช์หมุนไปที่เปิด และไดรฟ์ที่เหลือจะต้องตั้งไปที่ปิด
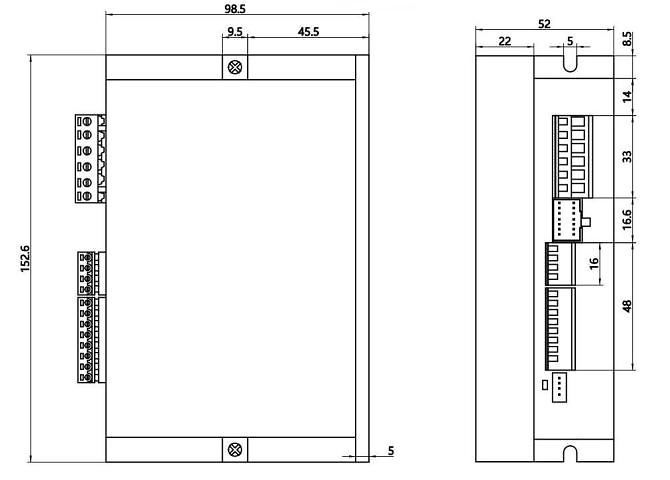
12.ขนาดโดยรวม (หน่วย = มม.)
13.บริการที่กำหนดเอง
เราให้บริการตัวเลือกในการปรับแต่งหลากหลายในด้านการออกแบบ เช่น ประเภทแกนขับออก ตัวเชื่อมต่อ เบรค เอนコーダ และเกียร์ เป็นต้น ผู้ใช้สามารถเลือกได้อย่างยืดหยุ่นตามความต้องการจริง นอกจากนี้ยังสามารถออกแบบและผลิตตามคำขอพิเศษเฉพาะได้อีกด้วย
ตัวเลือก 14
สายไฟ |
แหวนยึด |
ด้ามจับ |
สกรู |
|
|
|
|
ตัวเข้ารหัส |
เบรก |
เกียร์บ็อกซ์ |
และอื่นๆ อีกมากมาย |
|
|
|
+ |
ใบรับรอง 15
เราได้ผ่านระบบการรับรองคุณภาพ ISO-9001 และได้รับสิทธิบัตรการใช้งานจำนวนหนึ่ง ผลิตภัณฑ์ของเราได้รับการรับรองระดับนานาชาติ เช่น CE และ ROHS

บทวิจารณ์ 16

ลิขสิทธิ์ © 2026 บริษัทฉางโจวจินซานซือเม่ย์จีอีเล็คโทรนิคส์ จำกัด ทั้งหมดสงวนสิทธิ์ - นโยบายความเป็นส่วนตัว










