

หน้าแรก > ผลิตภัณฑ์ > มอเตอร์เซอร์โวสเต็ปเปอร์แบบบูรณาการ > มอเตอร์เซอร์โวสเตปเปอร์อินทิกรีท

JSS42P ของเราเป็นชนิดของเครื่องยนต์เซอร์โวไฮบริด ที่รวมกับระบบขับขี่ ซึ่งมีฟังก์ชันการสื่อสาร การใช้เทคโนโลยีควบคุม ARM 32 บิตรุ่นใหม่และเทคโนโลยีควบคุมวงจรปิดสามารถป้องกันการสูญเสียขั้นตอนและรับประกันความแม่นยําของสินค้า; การลดความเร็วของโค้งความเร็วสูงต่ํากว่าของคนขับวงจรเปิดแบบดั้งเดิม ซึ่ง มันเป็นผลิตภัณฑ์ที่เหมาะสมสําหรับการปรับปรุงเครื่องขับขี่ stepper แบบเปิดวงจรแบบดั้งเดิม และสามารถแทนที่ระบบ servo AC แบบดั้งเดิมบางระบบ และราคาเพียง 50% ของระบบ servo AC เครื่องขั้นตอน JSS42P ของเรา
1.ลักษณะ
2.ตัวชี้วัดไฟฟ้า
แรงดันไฟฟ้าขาเข้า |
DC24V |
กระแสออก |
พิก 2.5A (เปลี่ยนแปลงกับภาระ) |
กระแสปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับป |
7 ~ 16mA แนะนํา 10mA |
ความถี่ของกระแทก |
0 ~ 200KHz |
ความละเอียดของ Encoder |
1000 |
ความต้านทานในการกันความร้อน |
≥ 500MΩ |
3.สภาพแวดล้อมการใช้งานและปารามิเตอร์
ประเภทการเย็น |
การเย็นธรรมชาติหรือเรดิเอเตอร์ภายนอก |
|
สภาพแวดล้อมการใช้งาน |
ใช้โอกาส |
พยายามหลีกเลี่ยงฝุ่น น้ํามัน และก๊าซที่กัดสนิม |
อุณหภูมิ |
0~40℃ |
|
ความชื้น |
40 ~ 90% RH |
|
การสั่นสะเทือน |
5.9m/s2Max |
|
อุณหภูมิการจัดเก็บ |
-20℃~80℃ |
|
น้ำหนัก |
ประมาณ 0.5 กิโลกรัม |
|
4.นิยามอินเตอร์เฟซ
(1) สายเข้าพลังงาน
หมายเลขปิน |
สัญลักษณ์ |
ชื่อ |
คำอธิบาย |
1 |
+Vdc |
ปลายบวกของไฟฟ้าไฟฟ้าแบบ DC |
การเข้า DC+24V |
2 |
GND |
แผ่นดินพลังงานแบบ DC |
|
3~6 |
NC |
(2) การควบคุมสัญญาณ
หมายเลขปิน |
สัญลักษณ์ |
ชื่อ |
คำอธิบาย |
1 |
PU+ |
การเข้าบวกต่อแรงกระแทก |
ยอมรับ 5 วอลต์ |
2 |
พีเอส- |
การเข้าลบแรงกระแทก |
|
3 |
DR+ |
การเข้าบวกทิศทาง |
|
4 |
DR- |
การเข้าทางลบ |
|
5 |
MF+ |
เอนกประสงค์การใส่บวก |
|
6 |
MF- |
เปิดการใส่ลบ |
|
7 |
ALM+ |
การออกสัญญาณเตือนเป็นบวก |
การออกประตู OC ปิดโดยซ่อนข้างแสดงสัญญาณเตือน สายวงจรเปิดแสดงสัญญาณเตือนไม่มี |
8 |
ALM- |
การออกสัญญาณเตือนลบ |
(3) การระบุสถานะ
PWR: ไฟชี้พลังงาน เมื่อไฟไฟถูกเปิด ไฟชี้สีเขียวถูกเปิด
ALM: ไฟแสดงความผิดพลาด ไฟแดงส่องส่องครั้งเดียวภายใน 3 วินาที: ความผิดพลาดในวงจรสั้นเกินปัจจุบันหรือระยะต่อระยะ; ไฟแดงส่องส่องส่องส่องส่อง 2 ครั้งต่อเนื่องภายใน 3 วินาที: ความผิดพลาดในระดับความแรงเกิน; ไฟแดง
5.การตั้งค่าสวิตช์ DIP
JSS42P ใช้สวิตช์ DIP 5 หลักในการตั้งทิศทางหมุนของมอเตอร์และความแม่นยําของการแบ่งย่อย
SW1: การตั้งทิศทางหมุนของมอเตอร์. on=CW, off=CCW
SW2, SW3, SW4, SW5: การตั้งค่าการแบ่งย่อย
อัมพวาส/REV |
SW2 |
SW3 |
SW4 |
SW5 |
400 |
บน |
บน |
บน |
บน |
800 |
ส่ง |
บน |
บน |
บน |
1600 |
บน |
ส่ง |
บน |
บน |
3200 |
ส่ง |
ส่ง |
ON) |
บน |
6400 |
บน |
บน |
ส่ง |
บน |
12800 |
ส่ง |
บน |
ส่ง |
บน |
25600 |
บน |
ส่ง |
ส่ง |
บน |
51200 |
ส่ง |
ส่ง |
ส่ง |
บน |
1000 |
บน |
บน |
บน |
ส่ง |
2000 |
ส่ง |
บน |
บน |
ส่ง |
4000 |
บน |
ส่ง |
บน |
ส่ง |
5000 |
ส่ง |
ส่ง |
บน |
ส่ง |
8000 |
บน |
บน |
ส่ง |
ส่ง |
10000 |
ส่ง |
บน |
ส่ง |
ส่ง |
20000 |
บน |
ส่ง |
ส่ง |
ส่ง |
40000 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
เลขส่วนย่อยนี้สามารถปรับเปลี่ยนด้วยโปรแกรมคอมพิวเตอร์ชั้นบน
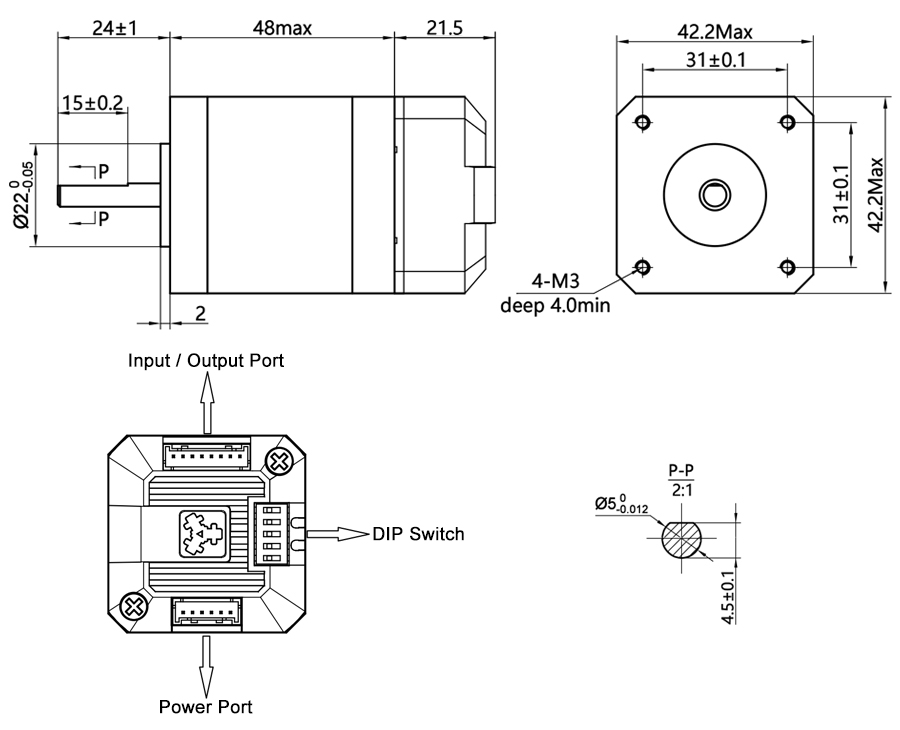
6.มิติทั่วไป
7.ใบรับรอง
เราได้ผ่านระบบการรับรองคุณภาพ ISO-9001 และได้รับสิทธิบัตรการใช้งานจำนวนหนึ่ง ผลิตภัณฑ์ของเราได้รับการรับรองระดับนานาชาติ เช่น CE และ ROHS

8.รีวิว

ลิขสิทธิ์ © 2026 บริษัทฉางโจวจินซานซือเม่ย์จีอีเล็คโทรนิคส์ จำกัด ทั้งหมดสงวนสิทธิ์ - นโยบายความเป็นส่วนตัว



