

หน้าแรก > ผลิตภัณฑ์ > มอเตอร์เซอร์โวสเต็ปเปอร์แบบบูรณาการ > RS485 มอเตอร์เซอร์โวสเตปเปอร์อินทิกรีต

JSS57R ของเราเป็นเครื่องยนต์เซอร์โวไฮบริดที่บูรณาการ ซึ่งใช้รถบัส RS485 ซึ่งรองรับโปรโตคอล Modbus RTU สินค้านี้รวมมอเตอร์เซอร์โวไฮบริดและคนขับ และใช้โปรโตคอลสื่อสารรถบัส Modbus RTU มาตรฐานสําหรับการควบคุม เมื่อเทียบกับการรวมกันแบบดั้งเดิมของเครื่องขับเคลื่อนมอเตอร์สเตปเปอร์ และมอเตอร์สเตปเปอร์ ความสามารถในการประหยัดค่าใช้จ่ายสูงกว่า สินค้าเซอร์โวไฮบริดอินทิกรีตนี้รวมข้อดีของการควบคุมการสื่อสารรถบัส การเชื่อมต่อสายไฟง่าย ไม่มีการสูญเสียขั้นตอน การเพิ่มอุณหภูมิต่ํา เสียงต่ํา ความเร็วสูง ทอมปอร์คสูง และราคาต่ํา มันเป็นสินค้าควบคุมการเคลื่อนไหวที่คุ้มค่ามาก
1.ลักษณะ
2.นิติบุคคลไฟฟ้า
หมายเลขรุ่น |
มุมขั้น |
ความยาวของมอเตอร์ |
ปัจจุบัน /Phase |
การต่อต้าน /Phase |
ความเหนี่ยวนำ /Phase |
ทอร์คการยึด |
(°) |
(L) มม |
A |
ω |
mH |
น.ม. |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.ตัวชี้วัดไฟฟ้า
การให้พลังงาน |
DC24~48V แหล่งจ่ายไฟที่แนะนำ DC36V |
กระแสออก |
สูงสุด 6.0A (กระแสเปลี่ยนอยู่กับภาระ) |
กระแสปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับปรับป |
7 ~ 16mA, 10mA แนะนํา |
ประเภทการสื่อสาร |
RS485 |
อัตราการสื่อสารสูงสุด |
115200bps |
การให้พลังงาน |
DC24~48V แหล่งจ่ายไฟที่แนะนำ DC36V |
5.สภาพแวดล้อมการใช้งานและปารามิเตอร์
วิธีการระบายความร้อน |
การเย็นธรรมชาติหรือเรดิเอเตอร์ภายนอก |
|
สถานที่ใช้ |
ใช้โอกาส |
หลีกเลี่ยงฝุ่น น้ํามัน และก๊าซที่กัดกรอง |
อุณหภูมิ |
0~40℃ |
|
ความชื้น |
40 ~ 90% RH |
|
การสั่นสะเทือน |
5.9m/s2Max |
|
อุณหภูมิการจัดเก็บ |
-20℃~80℃ |
|
6.นิยามอินเตอร์เฟซ
(1) สายเข้าพลังงาน
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
แสดงให้เห็น |
1 |
+Vdc |
ปลายบวกของพลังงานแบบ DC |
DC+24V~48V แหล่งไฟฟ้า DC + 36V ที่แนะนํา |
2 |
GND |
แผ่นดินพลังงานแบบ DC |
(2) การควบคุมสัญญาณ
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
แสดงให้เห็น |
1 |
CCW+ |
ขั้นต่ําบวกบวก |
การสนับสนุน +5V ~ +24V |
2 |
CCW- |
ขั้นต่ําบวกลบ |
|
3 |
HOME+ |
สาเหตุทางกลคือบวก |
|
4 |
บ้าน |
สาเหตุทางกลลบ |
|
5 |
CW+ |
ต่ําสุดลบ สิทธิ |
|
6 |
CW- |
ต่ําสุดลบ |
|
7 |
PEND+ |
การออกสัญญาณในตําแหน่ง |
|
8 |
รอ... |
การออกสัญญาณในตําแหน่งลบ |
|
9 |
ALM+ |
สัญญาณเตือนกําลังออก |
|
10 |
ALM- |
การออกสัญญาณเตือนลบ |
(3) สายพานสื่อ RS485
เลขของเทอร์มินัล |
สัญลักษณ์ |
ชื่อ |
1 |
RS485+ |
อินเตอร์เฟซการสื่อสาร RS485 |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4) การระบุสถานะ
พีดวาร์: ตัวชี้พลังงาน เมื่อเปิดไฟ ไฟชี้สีเขียวจะส่องอยู่เสมอ
ALM: ตัวแสดงความผิดพลาด ไฟแดงส่องส่องครั้งเดียวภายใน 3 วินาที: ความผิดพลาดในวงจรสั้นเกินปัจจุบันหรือระยะต่อระยะ;
ไฟแดงส่องส่อง 7 ครั้งต่อเนื่องภายใน 3 วินาที: ความผิดพลาดตําแหน่งเกินระดับการเตือน
7.การตั้งค่าสวิตช์ DIP
JSS57R ใช้สวิตช์ DIP 6 บิต เพื่อตั้งหมายเลขสถานีขับเคลื่อนและอัตราการสื่อสารบอด
SW1 ~ SW4: การตั้งค่าหมายเลขสถานีขับเคลื่อน SW5 ~ SW6: อัตราการสื่อสารของพาน หลังจากที่เลขสถานีทาสและอัตราการสื่อสารของบอดถูกปรับปรุง มันต้องเปิดใหม่เพื่อให้มีผล
จํานวนทาส |
SW1 |
SW2 |
SW3 |
SW4 |
ค่าเริ่มต้น |
บน |
บน |
บน |
บน |
1 |
ส่ง |
บน |
บน |
บน |
2 |
บน |
ส่ง |
บน |
บน |
3 |
ส่ง |
ส่ง |
บน |
บน |
4 |
บน |
บน |
ส่ง |
บน |
5 |
ส่ง |
บน |
ส่ง |
บน |
6 |
บน |
ส่ง |
ส่ง |
บน |
7 |
ส่ง |
ส่ง |
ส่ง |
บน |
8 |
บน |
บน |
บน |
ส่ง |
9 |
ส่ง |
บน |
บน |
ส่ง |
10 |
บน |
ส่ง |
บน |
ส่ง |
11 |
ส่ง |
ส่ง |
บน |
ส่ง |
12 |
บน |
บน |
ส่ง |
ส่ง |
13 |
ส่ง |
บน |
ส่ง |
ส่ง |
14 |
บน |
ส่ง |
ส่ง |
ส่ง |
15 |
ส่ง |
ส่ง |
ส่ง |
ส่ง |
หมายเหตุ: การตั้งค่าหมายเลขสถานีทาส, เมื่ออยู่ในไฟล์แบบพิมพ์, สามารถกําหนดหมายเลขสถานีทาสโดยการตั้งค่าทะเบียนหมายเลขสถานีทาส (0x0020) โดยระยะ 1 ~ 31.
อัตราบอดเรทการสื่อสาร |
SW5 |
SW6 |
9600 |
บน |
บน |
19200 |
ส่ง |
บน |
38400 |
บน |
ส่ง |
115200 |
ส่ง |
ส่ง |
หมายเหตุ: เมื่ออัตราการสื่อสารบอดถูกตั้งเป็น 9600bps การจัดรูปแบบข้อมูลลําดับจะคงที่ 8 บิตข้อมูล ไม่มี parity และ 1 stop bit เมื่อตั้งให้มีอัตราการส่ง 3 บาวด์อื่นๆ โฟเมทข้อมูลพอร์ตลําดับจะกําหนดโดยเรจิสเตอร์รูปแบบข้อมูลพอร์ตลําดับ (0x0021)
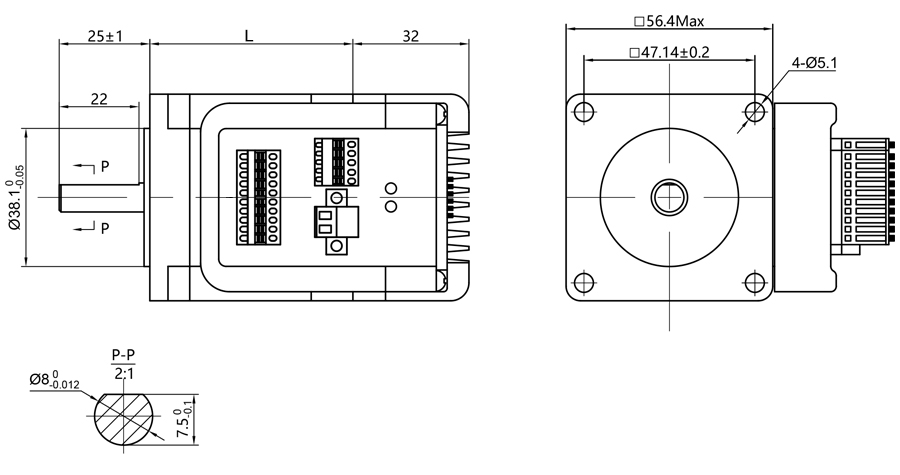
8.มิติโดยรวม
9.ใบรับรอง
เราได้ผ่านระบบการรับรองคุณภาพ ISO-9001 และได้รับสิทธิบัตรการใช้งานจำนวนหนึ่ง ผลิตภัณฑ์ของเราได้รับการรับรองระดับนานาชาติ เช่น CE และ ROHS

10.รีวิว

ลิขสิทธิ์ © 2026 บริษัทฉางโจวจินซานซือเม่ย์จีอีเล็คโทรนิคส์ จำกัด ทั้งหมดสงวนสิทธิ์ - นโยบายความเป็นส่วนตัว


