

Վերջին տարիներին հզորության էլեկտրոնիկայի արագ զարգացման և ինտելեկտուալ ու ավտոմատացված սարքավորումների լայն տարածման շնորհիվ շարժիչների տեխնոլոգիան ներխուժել է նոր դարաշրջան։ Էլեկտրոնային արտադրությունը, բժշկական սարքավորումները, ավիատիեզերական արդյունաբերությունը և ռոբոտատեխնիկան ավելի ու ավելի խիստ պահանջներ են ներկայացնում շարժիչների աշխատանքի նկատմամբ՝ հատկապես արագության ճշգրտության, մոմենտի կայունության, աղմուկի վերահսկման և երկարաժամկետ հուսալիության տեսանկյունից:
Այս պայմաններում մշտական մագնիսով խոստացող անհպական տրամաչափի տրամաչափի շարժիչը (BLDC Motor) դարձել է համաշխարհային շուկայում հիմնական և ամենավստահելի ընտրություններից մեկը:
Ինչո՞ւ ընտրել անհպական տրամաչափի շարժիչ. — Ճշգրտություն, արդյունավետություն և մաշվածության դիմացկունություն մեկում
Համեմատած հպական տրամաչափի շարժիչների հետ՝ BLDC շարժիչները վերացնում են մեխանիկական հպակները և կիրառում էլեկտրոնային կոմուտացիա, որը տալիս է կարևոր առավելություններ.
Այս հատկանիշների շնորհիվ BLDC շարժիչները լայնորեն օգտագործվում են անօդաչու անապայուղներում, ռոբոտատեխնիկայում, AGV տրանսպորտային միջոցներում, վենտիլյատորներում, էլեկտրական գործիքներում, կոմպրեսորներում, պոմպերում և ինտելեկտուալ տնտեսություն սարքեր։
Մշտական մագնիսով առանց մետղքերի տրանսպորտային շարժիչի ներքին կառուցվածք
BLDC շարժիչը եռաֆազ շարժիչ է, որը սնվում է հաստատուն հոսանքից և կառավարվում է էլեկտրոնային կոմուտացիայի միջոցով: Այն հիմնականում բաղկացած է


Կախված ռոտորի դիրքը որոշելու մեթոդից՝ BLDC շարժիչները կարող են լինել երկու տեսակի
1. Հոլի սենսորով առանց մետաղակերպիչ տրամակայության շարժիչներ (սենսորային BLDC)
Ապահովված են դիրքի սենսորներով (օրինակ՝ Հոլի սենսորներ), որոնք հսկում են ռոտորի մագնիսական բևեռի դիրքը: MCU-ն իրականացնում է ճշգրիտ կոմուտացիա՝ հիմնվելով սենսորի սիգնալի վրա:
Հարմար է համար:
2. Առանց սենսորի առանց մետաղակերպիչ տրամակայության շարժիչներ
Ռոտորի դիրքը որոշվում է պտուտակների հակադարձ ԷՇՀ-ի միջոցով:
Առավելությունները ներառում են.
BLDC շարժիչների երկու տեսակն էլ կարող են լիովին պատվիրատուի պահանջներին համապատասխան պատրաստվել՝ ըստ լարման, պտտման մոմենտի, KV արժեքի, չափսերի, առանցքի տեսակի և միացման սխեմայի:
Շարժիչի պտուտակներ և կոմուտացիայի սկզբունք
Ստատորը պարունակում է վեց գալար, որոնք կազմում են երեք պտույտային զույգ (A, B, C փուլեր): Յուրաքանչյուր ցիկլի ընթացքում միացված են միայն երկու փուլեր: Կոմուտացիայի հաջորդականություններն են՝
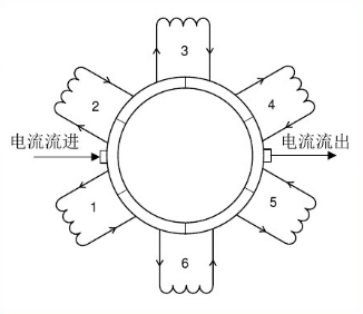
Կորուստները նվազագույնի հասցնելու և բեռնամբարի առավելագույնը մեծացնելու համար կոմուտացիան պետք է իրականացվի, երբ ստատորի մագնիսական դաշտը ուղղահայաց է ռոտորի մագնիսական դաշտին՝ սա կենսական նշանակություն ունի BLDC շարժիչներում բարձր կատարողականություն հասնելու համար:
Շարժիչի կատարողականության բանաձևեր (հաճախադեպ տրվող հարցեր)
1. Արագության բանաձև
n = 60f / P
n՝ արագություն (r/ր) f՝ էլեկտրական հաճախականություն P՝ բևեռային զույգերի քանակ
2. Մոմենտի բանաձև
T = 9550P / n
T՝ մոմենտ (Ն·մ), P՝ հզորություն (կՎտ), n՝ պտտման արագություն (ռ/ր)
Օրինակ՝
Մեր ինժեներական թիմը կարող է օգնել ընտրել շարժիչ՝ կախված Ձեր պահանջվող մոմենտից, հզորությունից և արագությունից:
Կիրառություններ՝ արդյունաբերական համակարգերից մինչև սպառողական էլեկտրոնիկա
Հիանալի արդյունավետության և հուսալիության շնորհիվ մշտական մագնիսային BLDC շարժիչները ներկայումս օգտագործվում են՝
Անկախ նրանից՝ ձեր հիմնական պահանջը ցածր աղմուկն է, բարձր արագությունը, կայունությունը, թե երկարաժամկետ տևողությունը, BLDC շարժիչը մնում է գերազանց ընտրություն:
Մեր առավելությունները որպես մասնագիտացված BLDC շարժիչների մատակարար
Մենք նվիրված ենք աշխարհի հաճախորդներին երկարաժամկետ օգտագործման համար առաջարկելու բարձր կարողություններով, ճշգրիտ և հուսալի անխողովակ BLDC շարժիչների լուծումներ:
© 2026 Չանչժոու Ջինսանշի Մեխատրոնիկայի ընկերություն, բոլոր իրավունքները պաշտպանված են։ - Գաղտնիության քաղաքականություն