



なぜすべてのステッピングモータードライバーの最初の使用前に電流制限を設定する必要があるのか?
ステッパーモーターコントロールシステムにおける電流制限の理解 ステッパーモータードライバーは、現代の自動化および精密制御アプリケーションにおいて極めて重要な役割を果たしています。初期運転前に適切な電流制限を設定することは、単なる推奨事項ではなく、むしろ必須のプロセスです。
さらに表示


26
Sep
20
Oct
27
Nov
12
Dec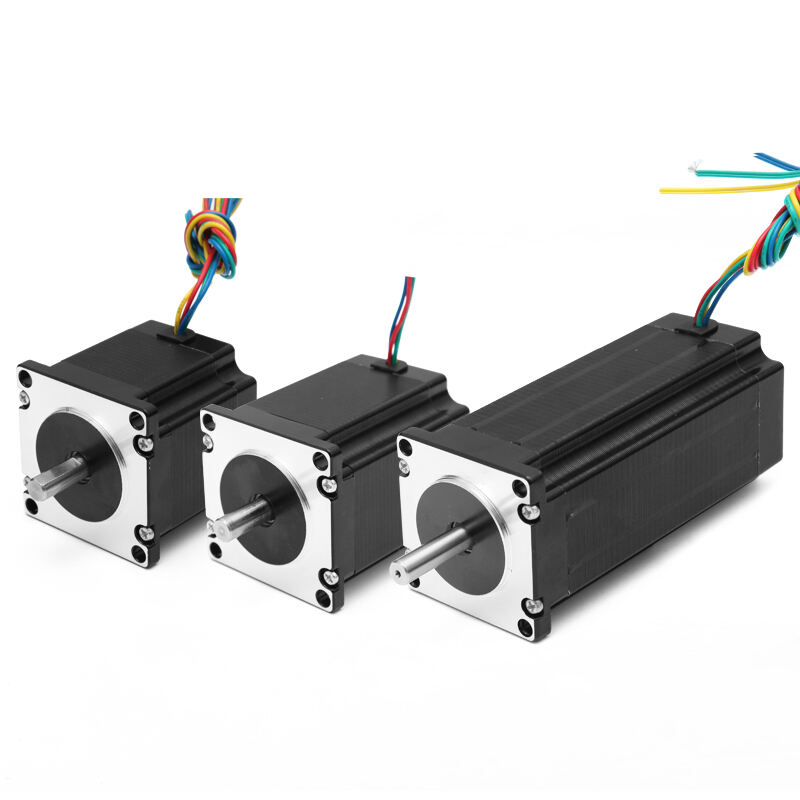

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. すべての権利を保有。 - プライバシーポリシー