

Pagrindinis Puslapis > Produktai > integruoti Važiuojantieji Servo Varikliai > RS485 Integruoti žingsnio servomotorius

Mūsų JSS57R yra integruotas hibridinis servomotorius, pagrįstas RS485 autobusu, kuris palaiko Modbus RTU protokolą. Šis produktas integruoja hibridinį servomotorį ir vairuotoją ir valdo pagal standartinį Modbus RTU autobusų ryšio protokolą. Palyginti su tradiciniu žingsnio variklio ir žingsnio variklio junginiu, sąnaudų efektyvumas yra didesnis. Šis integruotas hibridinis servo produktas apima autobusų ryšio valdymo, paprastų laidų, jokių prarastų žingsnių, mažo temperatūros pakilimo, mažo triukšmo, didelio greičio, didelio sukimo momento ir mažos kainos privalumus. Tai labai ekonomiškas judėjimo valdymo produktas.
1.Rinkiniai
2.Elektrinės specifikacijos
Modelio Nr. |
Sėdynės kampas |
Motoriaus ilgis |
Dabartinė /Phase |
Atsparumas /Phase |
Induktansas /Phase |
Laikomasis sukimo momentas |
(°) |
(L) mm |
A |
ω |
mH |
N.M |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Elektriniai rodikliai
Energijos šaltinis |
DC24~48V, rekomenduojamas maitinimas DC36V |
Išėjimo srovė |
Didžiausia 6.0A (krėtimas priklauso nuo apkrovos) |
Loginės įvesties srovė |
7~16mA, rekomenduojama 10mA |
Pranešimo tipas |
RS485 |
didžiausia ryšio greitis |
115 200 bps |
Energijos šaltinis |
DC24~48V, rekomenduojamas maitinimas DC36V |
5.Naudojimo aplinka ir parametrai
Aušinimo būdas |
Natūralus aušinimas arba išorinis radiatorius |
|
Naudojimo aplinka |
Pasinaudokite progomis |
Kiek įmanoma vengti dulkių, aliejaus ir griaunamų dujų |
Temperatūra |
0~40℃ |
|
Drėgmė |
40 ~ 90% RH |
|
Vibracija |
5,9 m/s2Max |
|
Laikymo temperatūra |
-20℃~80℃ |
|
6.Siešinio apibrėžimas
(1)Sugebėjimo įvesties jungtis
Terminalo numeris |
Simbolis |
Vardas |
Iliustruoti |
1 |
+Vdc |
Bendros srovės maitinimo teigiamas galinis terminalis |
DC+24V~48V Rekomenduojamas DC+36V maitinimo šaltinis |
2 |
GND |
Nuolatinio srovės maitinimo grindų |
(2)Valdymo signalo uostas
Terminalo numeris |
Simbolis |
Vardas |
Iliustruoti |
1 |
CCW+ |
Pozityvi riba |
Parama +5V ~ +24V |
2 |
CCW- |
Pozityvi riba - neigiama |
|
3 |
NAMAS + |
Mechaninė kilmė yra teigiama. |
|
4 |
NAMS... |
Negatyvi mechaninė kilmė |
|
5 |
CW+ |
Negatyvi riba teigiama |
|
6 |
CW- |
Negatyvi riba - neigiama |
|
7 |
PEND+ |
Įstojimo padėties signalas |
|
8 |
Pasislėpk... |
Įstojimo padėties signalas |
|
9 |
ALM+ |
Išleidžiamas signalas. |
|
10 |
ALM- |
Įspūdžio signalo neigiamas išėjimas |
(3) RS485 ryšio jungtis
Terminalo numeris |
Simbolis |
Vardas |
1 |
RS485+ |
RS485 ryšio sąsaja |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4)Statuso nuoroda
PWR: galios rodiklis. Įjungus žalią šviesą, ji visada yra įjungta.
- Klaidos indikatorius. Raudona šviesa mirks vieną kartą per 3 sekundes: perkrovos arba fazės-pasei trumpojo jungties gedimas; šviesos mirks 2 kartus per 3 sekundes: perpūstos gedimas;
Raudona žibinta besilaikant 7 kartus per 3 sekundes: padėties klaida yra nebelieka toleravimo ribos.
7.DIP jungiklio nustatymas
JSS57R naudoja 6 bitų DIP jungiklį, kad nustatytų variklio stoties numerį ir ryšio baudų dažnį.
SW1~SW4: Įjungimo stoties numerio nustatymas. SW5~SW6: Vairuotojo ryšio baudų greitis. Kai pakeičiamas slavo stoties numeris ir ryšio baudų greitis, jis turi būti vėl įjungtas, kad įsigaliotų.
Vergo skaičius |
SW1 |
SW2 |
SW3 |
SW4 |
numaldomasis |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
1 |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
2 |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
3 |
Išjungtas |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
4 |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
5 |
Išjungtas |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
6 |
ĮJUNGTA |
Išjungtas |
Išjungtas |
ĮJUNGTA |
7 |
Išjungtas |
Išjungtas |
Išjungtas |
ĮJUNGTA |
8 |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
9 |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
10 |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
Išjungtas |
11 |
Išjungtas |
Išjungtas |
ĮJUNGTA |
Išjungtas |
12 |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
Išjungtas |
13 |
Išjungtas |
ĮJUNGTA |
Išjungtas |
Išjungtas |
14 |
ĮJUNGTA |
Išjungtas |
Išjungtas |
Išjungtas |
15 |
Išjungtas |
Išjungtas |
Išjungtas |
Išjungtas |
Pastaba: "slave station" numerio nustatymas, kai jis yra numatytuosiame failyje, gali apibrėžti "slave station" numerį nustatant "slave station" numerio registrą (0x0020), diapazonas yra 1 ~ 31.
Ryšio perdavimo sparta |
SW5 |
SW6 |
9600 |
ĮJUNGTA |
ĮJUNGTA |
19200 |
Išjungtas |
ĮJUNGTA |
38400 |
ĮJUNGTA |
Išjungtas |
115200 |
Išjungtas |
Išjungtas |
Pastaba: kai ryšio baudų greitis nustatomas kaip 9600 bps, serijiniai duomenys turi būti įforminti į 8 duomenų bitus, be parity ir 1 stabdymo bitą. Kai nustatomas į kitus tris baudų dažnius, serijinės prieigos duomenų formatą nustato serijinės prieigos duomenų formato registras (0x0021).
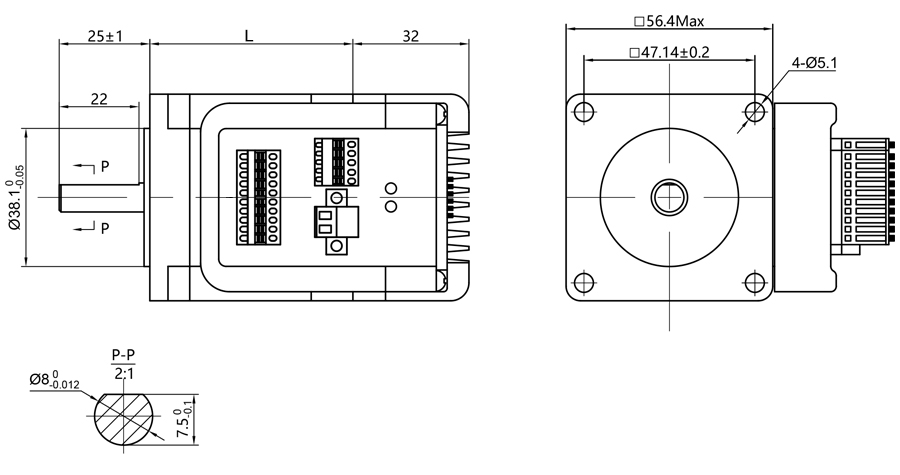
8.Sudėtinės matmenys
9.Sertifikatas
Mes praeijome ISO-9001 kokybės sertifikacijos sistemą ir gavome daugybę taikomų patentų. Mūsų produktai turi tarptautinius sertifikatus, tokious kaip CE ir ROHS.

10.Atsiliepimas

Autorių teisės © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Visos teisės saugomos. - Privatumo politika


