Pagrindinis Puslapis > Produktai > Servo Sistema > Integruoti nuolatinio srovės servomotorių

JSV57 integruotas servoelektromotorius yra 57 mm rėmo dydžio varžlių nemokamas DC variklis, integruotas su 16-bitu koduotuva ir servo varikliu. Šis DC servoelektromotorius naudoja 32-bitį ARM čipą ir optimizuotus valdymo algoritmus, turint puikų dizainą ir kompaktinę dydžio struktūrą. Variklio ir vairiklio integruotas dizainas ne tik sumažina ryšius tarp vairiklio ir variklio, bet ir efektyviai mažina elektromagnetinę sutrikimą tarp ryšių. Jis taiko geresnių antsvirpavimo ir žemo šilumos kilmens technologijų, efektyviai sprendžiant šilumos kilmės ir triukšmo problemas.
1.Rinkiniai
2. Tipinis pritaikymas
Tinkamas įvairioms mažosioms ir vidurinėms automatizacijos įrenginiams bei prietaisams, pvz., spalvų spausdinimo spausdintuvams, mažosioms ir vidurinėms raiškymo mašinoms, elektroniniam apdorojimo įrenginiui, automatiniam griovimo įrenginiui, specialioms CNC gaminančioms mašinoms, pakuotės įrenginiams ir kt. Ypač efektyvus įrenginiuose, kurie naudojami vartotojams, lankstusems triukų ir aukšto greičio atvejams.
3.Elektriniai rodikliai
Parametrai |
JSV57 |
|||
Min. |
Tipinė vertė |
Maks. |
VIENETAS |
|
Nuolatinis išėjimo srovės |
0 |
- |
6 |
A |
Įvesties jūrio įtampa |
24 |
36 |
48 |
VDC |
Loginės įvesties srovė |
7 |
10 |
16 |
mA |
Loginė įvesties įtampa |
5 |
5 |
24 |
V |
Pulso dažnis |
0 |
- |
200 |
kHz |
Izoliacijos atsparumas |
100 |
|
|
MΩ |
4.Elektrinė specifikacija
VIENETAS |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Fazės |
|
3 |
||
Poliai |
|
8 |
||
Įtampa |
|
36VDC |
||
Nominali galia |
W |
90 |
140 |
180 |
Vardinis sukimo momentas |
N.M |
0.28 |
0.45 |
0.57 |
Virpžtinis momentas |
N.M |
0.8 |
1.1 |
1.5 |
Nominalus greitis |
aps./min |
3000 |
3000 |
3000 |
Nominalus srovė |
A |
3.3 |
5 |
6.6 |
5. Variklio sąsajos ir kablių aprašymas
(1)Sugebėjimo įvesties jungtis
Terminalo numeris |
Simbolis |
Vardas |
Iliustruoti |
1 |
+Vdc |
Bendros srovės maitinimo teigiamas galinis terminalis |
DC+24V~48V |
2 |
GND |
Nuolatinio srovės maitinimo grindų |
0V |
(2)Valdymo signalo uostas
Terminalo numeris |
Simbolis |
Vardas |
Iliustruoti |
1 |
PUL + |
Impulsų įvestis + |
Suderinama su 5V~24V signalais |
2 |
PUL - |
Impulso įvestis - |
|
3 |
DIR + |
Krypties įvestis + |
|
4 |
DIR - |
Krypties įvestis - |
|
5 |
ENA + |
Įgalinti įvestį + |
|
6 |
ENA - |
Įjungti įvestį – |
|
7 |
PED + |
Padėties signalo išvestis + |
|
8 |
PED - |
Padėties signalo išvestis – |
|
9 |
ALM + |
Pavojaus signalo išvestis + |
|
10 |
ALM - |
Pavojaus signalo išvestis - |
(3) RS232 ryšio jungtis
Terminalo numeris |
Simbolis |
Vardas |
Iliustruoti |
1 |
NC |
|
|
2 |
RX |
RS232 imtuvas |
|
3 |
GND |
Galios žeme |
|
4 |
TX |
RS232 siuntėjas |
|
5 |
+5V |
Priverstinis maitinimo terminalo |
(Tai nereikia jungti) |
(4)Statuso nuoroda
PWR: Jūros rodiklis. Žaliasis rodiklis sišyla, kai yra pritaikomas jūra.
ALM: Nusikirtimo rodiklis. Kai įvyksta nusikirtis, rodiklis migoja 5 sekundžių cikle; kai vartotojas pašalina nusikirtimą, raudonas LED visada išjungtas. Raudonas LED migoja 2Hz dažniu, kurio metu LED yra įjungtas 200ms ir išjungtas 300ms. Raudonojo LED migojimų skaičius per 5 sekundes reprezentuoja skirtingą nusikirties informaciją, o specifinė sąryšio sąvoka pateikiama toliau esančioje lentelėje:
Eilės numeris |
Migojimų skaičius |
Nusikirties aprašymas |
1 |
1 |
Peršilumos nusikirtis |
2 |
2 |
Padėties paklaidos tolerancijos alarmas |
3 |
3 |
Kodavimo aparato gedimas |
4 |
4 |
Variklio perkrovimas |
5 |
5 |
Per didžioji voltinė būsenoje |
6 |
6 |
Per maža voltinė būsenoje |
6.DIP jungiklio nustatymas
7. Įvesties komandos filtravimas
Kai DIP perjungiklis S1 yra nustatytas į JŪS, įgalinamas įvesties filtras, o jo laikas konfigūruojamas registre 2603; ši funkcija veikia tik tada, kai variklis atrakinotas;
JSV57 variklio valdiklis naudoja šešių pozicijų DIP perjungiklį, kad nustatytų dalijimosi tikslumą ir variklio sukimo kryptį.
(1)Krypties nustatymas
Kryptis |
S2 |
PAP |
Išjungtas |
CW |
ĮJUNGTA |
(2)Mikrožingsnio nustatymas
Pulsas/apsisukimas |
S3 |
S4 |
S5 |
S6 |
Numaldomasis |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
400 |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
800 |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
1600 |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
3200 |
Išjungtas |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
6400 |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
12800 |
Išjungtas |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
25600 |
ĮJUNGTA |
Išjungtas |
Išjungtas |
ĮJUNGTA |
51200 |
Išjungtas |
Išjungtas |
Išjungtas |
ĮJUNGTA |
1000 |
ĮJUNGTA |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
2000 |
Išjungtas |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
4000 |
ĮJUNGTA |
Išjungtas |
ĮJUNGTA |
Išjungtas |
5000 |
Išjungtas |
Išjungtas |
ĮJUNGTA |
Išjungtas |
8000 |
ĮJUNGTA |
ĮJUNGTA |
Išjungtas |
Išjungtas |
10000 |
Išjungtas |
ĮJUNGTA |
Išjungtas |
Išjungtas |
20000 |
ĮJUNGTA |
Išjungtas |
Išjungtas |
Išjungtas |
40000 |
Išjungtas |
Išjungtas |
Išjungtas |
Išjungtas |
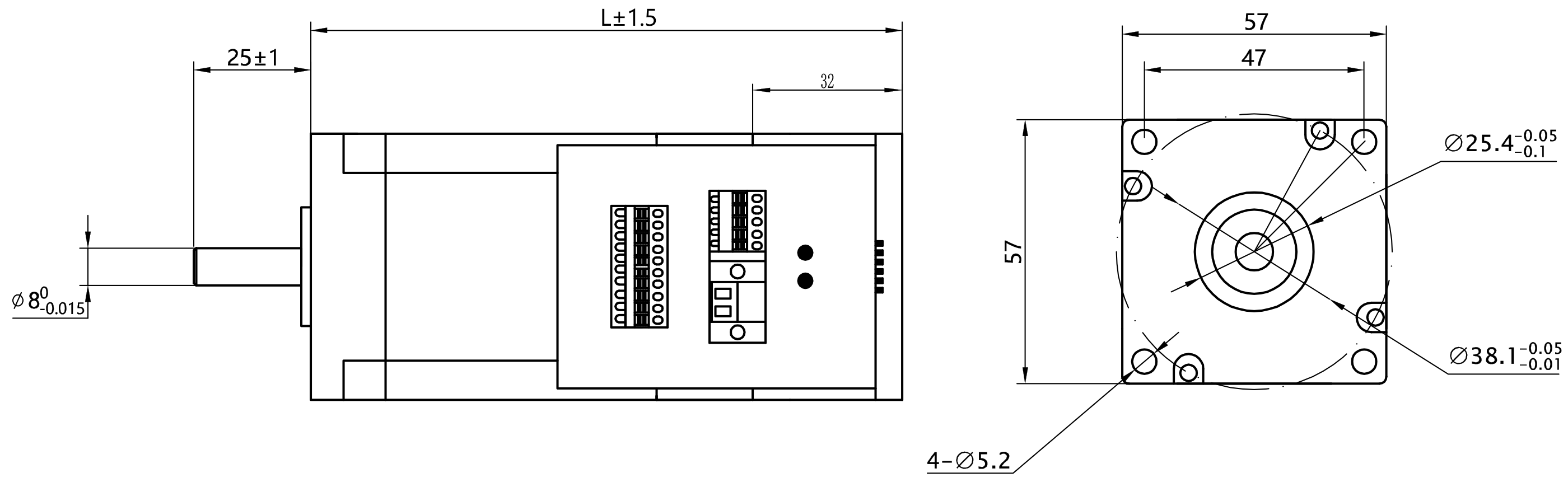
8.Motoriaus matmenys (vienetai=mm)
9.Sertifikatas
Mes praeijome ISO-9001 kokybės sertifikacijos sistemą ir gavome daugybę taikomų patentų. Mūsų produktai turi tarptautinius sertifikatus, tokious kaip CE ir ROHS.

10.Atsiliepimas

Autorių teisės © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Visos teisės saugomos. - Privatumo politika