

Pagina Principală > Produse > motoare Servo Cu Pasă Integrate > RS485 Servo-motori cu pas integrat

JSS57R este un servo motor hibrid integrat bazat pe autobuzul RS485, care acceptă protocolul Modbus RTU. Acest produs integrează servomotorul hibrid și șoferul și utilizează protocolul de comunicare standard Modbus RTU pentru control. În comparație cu combinația tradițională de motor cu motor pas cu pas și motor pas cu pas, performanța costurilor este mai mare. Acest produs servo hibrid integrat integrează avantajele controlului comunicațiilor cu autobuzul, cablarea simplă, lipsa de pași pierduți, creșterea scăzută a temperaturii, zgomotul scăzut, viteza ridicată, cuplul ridicat și costul scăzut. Este un produs de control al mișcării foarte eficient din punct de vedere al costurilor.
1. Caracteristici
2.Specificatiile electrice
Model NR. |
Unghiul pasului |
Lungimea motorului |
Curent /Phase |
Rezistenţă /Phase |
Inductanţă /Phase |
Partea de acționare |
(°) |
(L) mm |
A |
ω |
mH |
N.M |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Indicatorii electrici
Sursă de Alimentare |
DC24~48V, sursa de alimentare recomandată DC36V |
Curent de ieșire |
Punctul maxim de 6.0A (curentul variază în funcție de sarcină) |
Curent de intrare logică |
7~16mA, 10mA recomandate |
Tip de comunicare |
RS485 |
rata maximă de comunicare |
115200bps |
Sursă de Alimentare |
DC24~48V, sursa de alimentare recomandată DC36V |
5.Ambientul de utilizare și parametrii
Metodă de răcire |
Refrigerare naturală sau radiator extern |
|
Mediu de utilizare |
Folosiţi ocaziile |
Evită praful, uleiul și gazele corozive pe cât posibil |
Temperatură |
0~40℃ |
|
Umiditate |
40 - 90% RH |
|
Vibratie |
5,9 m/s2max |
|
Temperatura de stocare |
-20℃~80℃ |
|
6.Definiția interfeței
(1)Port de intrare pentru alimentare
Numărul terminalului |
Simbol |
Nume |
Ilustrează |
1 |
+Vdc |
Terminal pozitiv de alimentare cu curent continuu |
DC+24V~48V Suport de alimentare DC+36V recomandat |
2 |
GND |
Pământul cu alimentare cu curent continuu |
(2) Portul de semnal de control
Numărul terminalului |
Simbol |
Nume |
Ilustrează |
1 |
CCW+ |
Limita pozitivă pozitivă |
Suport de +5V~+24V |
2 |
CCW- |
Limita pozitivă negativă |
|
3 |
HOME+ |
Originea mecanică este pozitivă. |
|
4 |
Acasă... |
Originea mecanică negativă |
|
5 |
CW+ |
Limita negativă pozitivă |
|
6 |
CW- |
Limita negativă negativă |
|
7 |
PEND+ |
Soluție de ieșire pozitivă a semnalului în poziție |
|
8 |
PEND... |
Soluția de ieșire a semnalului negativ în poziție |
|
9 |
ALM+ |
Semnalul de alarmă este emis. |
|
10 |
ALM- |
Senzori de semnal de alarmă |
(3) Portul de comunicație RS485
Numărul terminalului |
Simbol |
Nume |
1 |
RS485+ |
Interfața de comunicare RS485 |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4) Indicarea statutului
PWR: Indicator de alimentare. Când este pornit, indicatorul verde este mereu aprins.
ALM: Indicator de defect. Lumina roșie clipește o dată în 3 secunde: defect de supracurent sau scurtcircuit între faze; Lumina clipește de 2 ori continuu în 3 secunde: defect de supratensiune;
Lampa roșie clipește de 7 ori continuu în decurs de 3 secunde: alarma de eroare de poziție este în afara toleranței.
7.Setarea comutatorului DIP
JSS57R utilizează un comutator DIP de 6 biți pentru a seta numărul stației de propulsie și rata de comunicații.
SW1~SW4: Setarea numărului stației de rulare. SW5~SW6: Rata de comunicație cu unitatea. După ce numărul stației slave și rata de comunicație au fost modificate, trebuie să fie pornit din nou pentru a intra în vigoare.
Numărul slave |
SW1 |
SW2 |
SW3 |
SW4 |
implicit |
On |
On |
On |
On |
1 |
Închisă |
On |
On |
On |
2 |
On |
Închisă |
On |
On |
3 |
Închisă |
Închisă |
On |
On |
4 |
On |
On |
Închisă |
On |
5 |
Închisă |
On |
Închisă |
On |
6 |
On |
Închisă |
Închisă |
On |
7 |
Închisă |
Închisă |
Închisă |
On |
8 |
On |
On |
On |
Închisă |
9 |
Închisă |
On |
On |
Închisă |
10 |
On |
Închisă |
On |
Închisă |
11 |
Închisă |
Închisă |
On |
Închisă |
12 |
On |
On |
Închisă |
Închisă |
13 |
Închisă |
On |
Închisă |
Închisă |
14 |
On |
Închisă |
Închisă |
Închisă |
15 |
Închisă |
Închisă |
Închisă |
Închisă |
Notă: Setarea numărului de stație de sclav, atunci când este în fișierul implicit, poate defini numărul stației de sclav prin setarea registrului de număr de stație de sclav (0x0020), gama este de 1 ~ 31.
Rata de comunicație |
SW5 |
SW6 |
9600 |
On |
On |
19200 |
Închisă |
On |
38400 |
On |
Închisă |
115200 |
Închisă |
Închisă |
Notă: Atunci când rata de comunicație în baud este setată la 9600bps, formatul de date seriale este stabilit la 8 biți de date, fără paritate și 1 stop bit. Atunci când sunt setate la alte trei rate de baud, formatul de date de port serial este determinat de registrul formatului de date de port serial (0x0021).
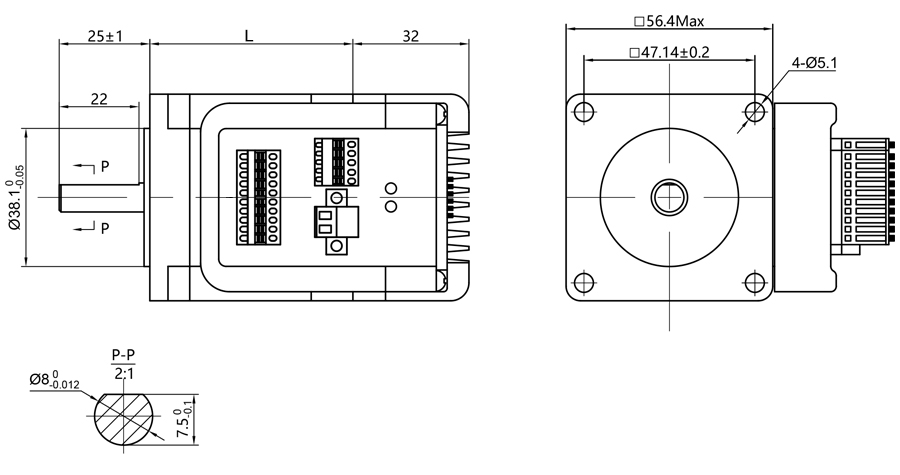
8.Dimensiuni generale
9.Certificat
Am trecut cu succes sistemul de certificare de calitate ISO-9001 și am obținut un număr de brevete de aplicație. Produsele noastre au certificări internaționale precum CE și ROHS.

10.Recenzie

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. Toate drepturile rezervate. - Politica de confidențialitate


